
| SUBMARINES SUBMERSIBLES ROVS & SUB-SEA EQUIPMENT. |
ROVs and SUPPORT EQUIPMENT FOR SALE. Email: sales@SilvercrestSubmarines.com
PLEASE CONTACT US FOR AN INDATE LIST OF ROVs AVAILABLE.
ROV FOR SALE and ROV FOR CHARTER. Thank you for contacting Silvercrest Ltd, concerning your ROV requirement. We will be pleased to offer every assistance that you may require, and discuss your ideas, in order to help you with your planned underwater project. At present we can offer for sale the following Rovs, and submersibles. Should this selection not match your exact requirement, please contact us to discuss other options.
Silvercrest has contacts worldwide, and we can usually source the correct underwater vehicle for your project and budget. We specialise in buying and selling secondhand submarines and Rovs designed for offshore activities, underwater tourism, subsea filming, scientific research, wreck hunting, salvage, dry transfer, and DSRV operations (submarine rescue). EMAIL: sales@silvercrestsubmarines.com
SUBMERSIBLE SUBSEA ROV ELECTRIC MOTORS and HPUs for SALE. Silvercrest/SME specialize in the bespoke manufacturing of submersible motors, and pumps for use on Rovs, subsea trenchers, subsea ploughs, dredgers and water lift pump systems, for use in the offshore Oil and Gas and Telecommunications industries. We offer a range of submersible motors (5hp to 1500hp) with a choice of voltages (ranging from 380vac to 6600vac) for use subsea, and in the more popular classes of subsea ploughs and Rovs. All of these motors are available in either SS316 or Hard Anodized Aluminium finish. We can also design and build motors to suit your individual and special project requirements. In addition we refurbish, rewire, and service a wide range of submersible motors. Our product is excellent, our prices very competitive, and our delivery schedule the best in the industry. We recently delivered ten 260kW, 3000VAC, double ended, 2-pole, stainless steel bodied motors to an offshore company, for use on their fleet of sub-sea trenchers. This was a bespoke order that was completed in just six weeks from receipt of order. We supply submersible motors, and motor- pump sets to SMD, CTC Marine, Fugro, Impresub, Saab SeaEye, LDtravocean, and many other subsea companies.
Please contact us to discuss the details of your motor / pump requirements in order to produce a detailed quotation for you. SILVERCREST SUBMARINES Email: sales@silvercrestsubmarines.com We will be pleased to offer every assistance that you may require, and discuss your ideas, in order to help you with your planned underwater project. At present we can offer for sale the following Rovs, manned submarines and submersibles.
Should this selection not match your exact requirement, please contact us to discuss other options.
Silvercrest has contacts worldwide, and we can usually source the correct underwater vehicle for your project and budget. We specialise in buying and selling secondhand submarines and Rovs designed for offshore activities, underwater tourism, subsea filming, scientific research, wreck hunting, salvage, dry transfer, and DSRV operations (submarine rescue).
SUBMERSIBLE SUBSEA ROV MOTORS, and ROV HPUs for SALE. Silvercrest/SME specialize in the bespoke manufacturing of submersible motors, and pumps for use on Rovs, subsea trenchers, subsea ploughs, dredgers and water lift pump systems, for use in the offshore Oil and Gas and Telecommunications industries.
We offer a range of submersible motors (5hp to 1500hp) with a choice of voltages (ranging from 380vac to 6600vac) for use subsea, and in the more popular classes of subsea ploughs and Rovs. All f these motors are available in either SS316 or Hard Anodized Aluminium finish. We can also design and build motors to suit your individual and special project requirements. In addition we refurbish, rewire, and service a wide range of submersible motors. Our product is excellent, our prices very competitive, and our delivery schedule the best in the industry.
We recently delivered ten 260kW, 3000VAC, double ended, 2-pole, stainless steel bodied motors to an offshore company, for use on their fleet of sub-sea trenchers. This was a bespoke order that was completed in just six weeks from receipt of order. We supply submersible motors, and motor- pump sets to SMD, CTC Marine, Fugro, Impresub, Saab SeaEye, LDtravocean, and many other subsea companies.
Contact us to discuss the details of your motor / pump requirements in order to produce a detailed quotation for you.
SUBMARINE SUPPORT EQUIPMENT. Silvercrest can supply a range of submarine and Rov support equipment.
For example: Submarine Escape Jerkins, Submersible Motors, Fiber Optic Umbilicals, Sonars, Underwater Communications, Underwater cameras, Submarine parts and consumables, plus a wide ange of other items.
Silvercrest/SME manufacture high quality submersible motors and thruster units for Rovs, underwater trenchers, ploughs and submarines. Output from 1Kw to 1500Kw, with voltages to 6000vac. Operational depth to 4000m available. Please contact us with your requirements, and we will be pleased to assist you.
SILVERCREST SUBMARINES. Tel: England (+44) 1285. 760620. E-mail: Sales@SilvercrestSubmarines.com
ROV’s FOR SALE.
We currently have several pre-owned Observation Class systems available for sale, and several New build Observation Class systems with a timely delivery lead time of 100 days.
Schilling HD ROV. 150hp ROV for sale, Built 2016. Depth 3000m..Manipulators Titan 4 and Rigmaster. Complete with Electro-hydraulic LARS. TMS. Control van, workshop container, and stores container.
SD600-4T ROV. (New) c/w 2f Gripper, Sonar, Cable Winch, Transit Case Deployment, 100m cable, Spares. Please note the SD600-4T is a brand-new system, with a 1-year warranty and critical spares kit. The system includes an umbilical winch with sliprings.
SD1200-8. Brand New.300m rated, Free Flyer C/w sonar, 8 x 550W/310V thrusters, FHD 1080p Colour camera, 5F grabber, LED Lights, 400m flying tether, over-shot lock/latch, Hand operated tether winch (with slip rings).
SD1300-8. Brand New.300m rated, Free Flyer C/w sonar, 8 x 1500W/380V thrusters, FHD 1080p Colour camera, 5F grabber, LED Lights, 400m flying tether, over-shot lock/latch, Hand operated tether winch (with slip rings). A range of tooling skid options.
Quantum ROV. 1x 125HP (3000m rated) (New cameras, 7F manip and 3200m umbilical).
Quantum ROV. 1 x 125HP (3000m rated) (New cameras, 7F manip and current 1200m umbilical) Price: GBP 671,000.
New MultiRov (3000m rated) (Includes spares & tooling).
RFOR IMMEDIATE SALE.
2 x POLLUX 111 ROVs. 2 x Pollux III vehicles C/W 300m umbilical, Tritech Micron sonar, gripper arm, HD Cameras. 1 x USBL for a dual system or 2 x USBL units for two complete systems. 1 x 300m umbilical spare. 1 x electric winch. 1 x altimeter. 2 x spare thruster units.
SPERRE SUBFIGHTER 30K ROV, LARS, TMS system for sale. Only 30 Running hours. ROV dimensions: 2400 x 1420 x 1040 mm (LxWxH). Weight: 972 kgs (approx.). Depth: 1,000 meters. Thrusters: 3 x vertical 2,000 kW each / 4 x horizontal 2,000 kW each / 2 x lateral 2,000 kW each. LARS system including winch. Class: DNVGL. Dimensions: 6000 x 3240 x 3464 mm (LxWxH) (without ROV attached). Weight: 20 MT. Power requirement: 400V / 3 Phase. LARS SWL: 3,000 kgs. System is ready for immediate shipment from onsite location. System stored indoor.
DEEP TREKKER ROV. Deep Trekker DTG2 ROV worker (with only 193 hours of use). In excellent condition and dive ready. Includes 150m tether & storage Reel. 5.6" LCD controller. Pelican Carry Case, 180-degree grabber. Turbo Thrusters. Auxiliary lights. Battery charging cables for ROV and controller. Deep Trekker tool bag and ballast weights, Gopro mount/attachment, Deep Trekker DTG2 instruction manual.
Cougar XT ROV for Sale. ROV Cougar XT S/N 1424 with tool skid, 2 x Hydrolek manipulator/grabber, Seaeye B&W + Colour cameras. Purchased 2008.Includes Control Cabin Zone II, TMS 8. No tether. No LARS. 275 hours of dives.
Predator ROV for sale. In excellent working condition. Hand Controller Unit. PC Unit c/w Monitor & Keyboard in Pelicase. Power Supply Unit c/w LIM Monitor in Pelicase. 10m Deck Lead. 100m Umbilical on Reel. Tritech Super Seaprince DST Profiler Head (On Vehicle).
VideoRay Pro4 ROV. Immaculate condition and well looked after. Excellent condition, Videoray pro 4, BlueView sonar, Tritech sonar, laser scaler, manipulator arm, cutter arm, 300 meters of tether, lots of spares and much more. All packed in Pelican carry boxes. Price: GBP 39, 986. ARGUS ROVER ROV. The Argus Rover is an observation class ROV. The Rover is designed around 6x ARS1500 thrusters. Where 4 are vectorized horizontally and 2 vertically. Two cameras are installed. One HD camera and one wide angle camera. More cameras can be fitted. The Electronic pod has a number of 24V/RS232 outputs and can be installed with ethernet output. Power (Kw/Hp): 15/20. Depth rating: 1000-3000msw. Dimensions LxWxH: 1,4m x 1m x 0,8m. Weight in air: 300 kg. Payload: 40kg. The package for sale includes a 20ft LARS CONTROL VAN. 20ft CONTROL VAN + WORKSHOP. ROVBUILDER for sale. RB Mini 300 - 200-meter operation depth. Color camera 600 TVL. 220 meter of cable. (hand winch). 15 Inch LED TV. 2 Jaw manipulator 2f (open/close + rotation). Second Black/White camera. Tritech Micron Sonar. Never been used, absolutely new.
NOTE. Heavy work class 150-300HP work class system We will shortly have a brand-new system available for sale. Price TBC.
NOTE. New inspection class ROVs available, all electric, our own build. Price subject to final specification. Please contact us for discussion.
SeaBotix ROV for sale. 200-meter system with a protective bumper frame, and 250 meters of umbilical housed on a reel. Four thrusters to propel the ROV in different directions, including laterally. Thruster gain control which enables an operator to provide more or less power to the vehicle for a more stable/less twitchy flight. Control console's video overlay provides information such as trim, auto depth, auto heading, temperature, camera tilt and focus, and light intensity. The screen can be customized with the date/time/job. Two cameras, one black and white, and one color. A variable intensity light tracks with the primary camera. The cameras rotate up and down to provide a 270-degree field of view. Fiber optic video which is viewed on the monitor encased in the waterproof, control console. Built in auxiliary port which can be used for sonar or other instrumentation. Transport cases. (The following items can also be made available at additional cost if required: manipulator arm and cutting head attachment, Tritech sonar, Tritech MicronNav USBL tracking system, and LYYN video enhancer).
Two x Hyball ROVs plus Spares. A very large amount of spare parts. plus 1 x standard Hyball and 1 x Offshore Hyball complete working units with umbilicals. From the spare parts another three ROVs could easily be built, and still have lots of spare parts left over. VideoRay Pro 4. Developed over 10 years, the VideoRay Pro 4 is the most capable mini-ROV (Remotely Operated Vehicle) on the market. Lightweight and easy to deploy, the VideoRay Pro 4 is the easiest way to carry out most underwater inspection tasks. Depth rated to 305 metres, with powerful brushless thrusters, the Pro 4 can operate in extremely demanding conditions. The ROV includes bright LED lighting, a smart digital camera with tilt & focus and robust float block design. The Control Box includes a laptop PC with VideoRay Cockpit software which allows you to easily view and record video or sonar images. Cockpit also includes built-in system test features, and provides video overlay including date, time, heading, depth, GPS position and ROV operators own text. Pro 4 Ultra Base ROV with 40m Performance tether.
POLLUX II ROV For sale. Length 880mm, Width 640mm, Height 530mm. Weight 83kg. Propulsion 4 brushless thruster motors (11kgf each). Max operative depth 400m. Auto depth, Auto heading. Video camera Sony ccd1/3” 380 lines. 2 x led lights 20W each. Chassis high density polypropylene with AISI 316 bolts and fixing system. Kevlar umbilical, 440 V power supply, 2 video lines, 2 spare lines. Portable Control Console (Explorer cases). Umbilical cable 150 meters. Technical Manual. Spare Parts Kit.
H300 MKII - Inspection ROV. Depth rated to 300 m. Sufficient power and thrust to withstand sea currents up to at least 3 knots. High performance viewing system, with both a colour/zoom TV camera (mounted on a full Pan/Tilt unit) and a B/W very low light TV camera. Altimeter (with auto altitude function). Positioning system. High resolution digital still camera. Manipulator arm. Single and ergonomic hand controller for both the ROV and a 5 functions manipulator arm. Control unit incorporating the power supply unit, and offering a PC screen with either video only, or the combination of video, sonar display and digital still control. Dimensions (mm): 900 L x 470 H x 600 W. Weight in air: 70 kg excluding optional equipment. Material: polypropylene frame, stainless steel fittings.
Contact us today, to discuss your submarine and Rov requirements. We are happy to offer a wide range of ideas and suggestions that will assist your underwater project.
SILVERCREST SUBMARINES Tel: England (+44) 1285.760620. E-mail: Sales@SilvercrestSubmarines.com
ROV’S FOR CHARTER. Tiger ROV for charter. Complete with TMS, Lars and support container. Manipulator arm, Tritech sonar, 1000m depth rating. Please contact us for details.
Seabotix 200 L for charter. With High Res Colour and low light B/W Camera, Sonar, Manipulator, High Power Camera tracking LED, 4 x high power External LEDs, brushless motors, 286m Fibre Optics, cable on Slip-ring Drum,
Seamor 300F2/4 for charter. With 915m F/O cable on Slip-ring drum, and 2000m F/O cable on motorized slip-ring drum. High resolution Colour Camera with 2 Halogen Tracking lights. Additional high power LEDs, Grabber, Option to fit Sonar Profiler or obstacle avoidance Sonar (both with measuring function and multiple range and resolution settings). Rear camera and LEDs. This Rov is a purpose built tunnel inspection vehicle and has two additional rearward thrusters to be able to pull the 2000m umbilical.
Ocean Modules V8Sii for charter. With High Res Colour Typhoon camera, 2 x Halogen , 4 x High Power LEDs, rear / endoscopic / manip camera, Grabber, Cutter. Option to fit Sonar Profiler or obstacle avoidance Sonar (both with measuring function and multiple range and resolution settings). Option for External Sensor Integration, side scan sonar. 300m Copper Umbilical on Slip-ring drum. 650m loose cable available, if longer penetration is required. Explorer 100hp WROV for charter. Complete system. 2000m depth rating. Please contact us for details.
SeaEye Tiger ROV available for charter, with TMS. 1000m rated. INSPECTION CLASS ROV for CHARTER.
We have several inspection class systems currently available, in various locations worldwide. Please provide detailed project information to enable us to produce a quotation. Currently available: Seaeye Surveyor Plus (Europe) Seaeye Tiger System (Mediterranean) Seaeye Falcon (Mediterranean) Ageotec ROV Systems (Singapore) Seaeye Cougar (Europe) Seaeye Panther Plus (Europe & Africa) Seaeye Cougar XT (UK) Sub-Atlantic Tomahawk (Europe) Seaeye Falcon ROV (UK) Sub-Atlantic Mojave ROV (Europe) Seaeye Falcon (Europe) Sub-Atlantic Mojave (Europe) Cougar XT Compact (Europe)
Argus Rover ROV (Europe/Mediterranean)
Seaeye Falcon ROV – Fibre Optic, 350m/1100m umb options (UK)
Seaeye Panther XT (Europe)
Seaeye Falcon ROV (Europe/Mediterranean)
Seaeye Falcon ROV (Container option) (UK) Please provide detailed project information to enable us to produce a quotation. 1. Type of ROV required
2, Region of charter?
3, Duration of charter?
4, Start Date?
5, Crew required?
6, Type of work?
7, Ancillary tooling or sensors required? 8. Dive Depth ?
If you could answer as many of these questions as possible, that will assist greatly. We look forward to further discussions with you.
Please contact us for details.
SILVERCREST SUBMARINES EMAIL: sales@silvercrestsubmarines.com
LATEST ROV's FOR SALE. ROV’S FOR SALE (m We currently have several pre-owned Observation Class systems available for sale, and several New build Observation Class systems with a timely delivery lead time of 100 days.
Mohave ROV. c/w umb, manip, lock latch, spares, photos available. Navajo ROV. c/w manip, laser, spare PCBs and thrusters + Spare vehicle for spares + 200m cable. AGEOTEC PERSEO ROV. 600m rated, cameras, winch with 450m umb, spares.
SD600-4T ROV. (New) c/w 2f Gripper, Sonar, Cable Winch, Transit Case Deployment, 100m cable, Spares. Please note the SD600-4T is a brand-new system, with a 1-year warranty and critical spares kit. The system includes an umbilical winch with sliprings.
Saab Seaeye Jaguar. 3000m rated; comes with CV, WS, ROV, Rigmaster 5F Grabber. Schilling Titan 4. 7F Manipulator, TMS, A Frame and Winch LARS.
Seaeye Falcon DR. 2017, c/w BlueView MB sonar, 1000m umb on winch.
SD1200-8. Brand New.300m rated, Free Flyer C/w sonar, 8 x 550W/310V thrusters, FHD 1080p Colour camera, 5F grabber, LED Lights, 400m flying tether, over-shot lock/latch, Hand operated tether winch (with slip rings).
Seaeye Surveyor. c/w LARS, 696m umb, manip, sonar, control van.
SD1300-8. Brand New.300m rated, Free Flyer C/w sonar, 8 x 1500W/380V thrusters, FHD 1080p Colour camera, 5F grabber, LED Lights, 400m flying tether, over-shot lock/latch, Hand operated tether winch (with slip rings). A range of tooling skid options.
Seaeye Tiger. c/w TMS, A-Frame LARS, 20’ control van, spares etc.
Sub Atlantic Apache. Free Flyer Refurbished sys., new 300m tether, electronic spares.
Seaeye Lynx. Built into container with winch and davit.
Perry Triton XL 44, 100 HP. 2000m rated Work Class System, TMS, LARS, Control Van and Workshop. The system is in full working condition. A good spares inventory comes with the system. Items not included in this sale – Cameras and Orion PE 7 Function Manipulator.
SMD Quantum 125HP, 3000m rated Work Class System. Comes with TMS, LARS, Control Van, Workshop and Spares Van. Brand New 3300m Lift umbilical; Vehicle incorporates Sonar, Altimeter, Depth transducer, Whittaker 5F Grabber, 4 x LED Lights + 3 x incandescent lights. 2 x Tritech Pan and Tilt units. This system is in working condition, but requires some cosmetic attention, which will be completed prior to delivery and is included in the price. No 7F Manipulator or cameras included. There are currently minimal spares with the system. We can either provide a recommended critical spare list and prepare a price list for you, or; you can allocate a budget and we can supply the most important spares utilizing that budget. To be agreed and confirmed.
ROV’S FOR IMMEDIATE SALE.
ROVBUILDER for sale. RB Mini 300 - 200-meter operation depth. Color camera 600 TVL. 220 meter of cable. (hand winch). 15 Inch LED TV. 2 Jaw manipulator 2f (open/close + rotation). Second Black/White camera. Tritech Micron Sonar. Never been used, absolutely new.
NOTE. Heavy work class 150-300HP work class system We will shortly have a brand-new system available for sale. Price TBC.
NOTE. New inspection class ROVs available, all electric, our own build. Price subject to final specification. Please contact us for discussion.
Seaeye Falcon DR (MG). Comes with the distributed I/O system, and 1000m umbilical on a winch.
MOHAWK ROV (MG). A Frame LARS and TMS/Garage, 16’ Control Van/Workshop, Hydro-Lek Manip skid, Tritech Super SeaKing Sonar, Compact Colour Zoom Camera, Mono Low Lux CCD Camera, Comprehensive Spares Kit.
AC-ROV (Model SP-50). The smallest inspection class Rov in the market place (190mm fly through). The AC-ROV is more powerful, more robust and a more cost-effective solution than all other Rovs in its class. This Rov can hover, circle, rotate on its axis, and move in any direction the target requires. Operating depth of 75-100m. A total system carry-case weight of under 15kg. The unit has been designed for inspection in hazardous and confined areas. Rov Size: 203mm x 152mm x 146mm. Weight: 3kg. Camera: Colour CCD. Thrusters: 6 thrusters (4 x horizontal vectored, 2 x vertical). Lights: 4 cluster leds (variable intensity). System Power: 300 watt (0.4hp). Payload: 300g. Inputs: 90/260vac (47/63Hz) or 124/370vdc. System includes: AC-ROV, Control Unit, Tether Reel with 80m tether, Monitor, Space mouse control, Depth Sensor, Video Grabber cable - plugs into Laptop/PC for recording, Storm Case.This ROV System is as new, and delivered dive ready.
Triton XL. Workclass ROV recently refurbished to high standard. Complete system dive ready. Includes TMS. No 7F manipulator and no cameras or sonar (These can be supplied upon request).
Triton WL. Workclass ROV recently refurbished to high standard. Complete system, dive ready. Free swimmer system (no TMS, no 7F manipulator and no cameras or sonar). These can be supplied upon request
ROV V8Sii for sale. (Location Europe). This ROV is as new and in excellent condition. Depth 500m. Classified as a light intervention vehicle. included in the Sale is Micron Sonar, Typhoon Camera, 2 Halogen Lights, 4 additional HP LED lights (each 1600 Lumen). Strong Grabber with Grabber LED Light. Micron Sonar Protection. Top Rail. MicronNav Transponder bracket. 2nd Camera port. 300m Umbilical (Copper with additional Twisted Pair) on compact slip ring drum. Deck lead 20m. Power unit (overlay board new) in Pelicase Spares kit (O-rings, Fuses, etc.). Spare cables (few thruster cables, etc). 1 Spare Thruster. 1 Spare Propeller (new). Thruster brackets (new).
SeaBotix ROV for sale. 200-meter system with a protective bumper frame, and 250 meters of umbilical housed on a reel. Four thrusters to propel the ROV in different directions, including laterally. Thruster gain control which enables an operator to provide more or less power to the vehicle for a more stable/less twitchy flight. Control console's video overlay provides information such as trim, auto depth, auto heading, temperature, camera tilt and focus, and light intensity. The screen can be customized with the date/time/job. Two cameras, one black and white, and one color. A variable intensity light tracks with the primary camera. The cameras rotate up and down to provide a 270-degree field of view. Fiber optic video which is viewed on the monitor encased in the waterproof, control console. Built in auxiliary port which can be used for sonar or other instrumentation. Transport cases. (The following items can also be made available at additional cost if required: manipulator arm and cutting head attachment, Tritech sonar, Tritech MicronNav USBL tracking system, and LYYN video enhancer).
Argus Mariner XXL-50.Work Class ROV 2000m depth rating, available for sale. Dive ready. Complete with operating containers, LARS, TMS, plus other equipment and spares as per specs sheet. Ideal for a wide range of tasks; survey, IRM, Drilling support, Free span corrections, Touchdown monitoring, Pipe laying support, Pipeline inspections.
Cougar XT ROV for Sale. ROV Cougar XT S/N 1424 with tool skid, 2 x Hydrolek manipulator/grabber, Seaeye B&W + Colour cameras. Purchased 2008. Includes Control Cabin Zone II, TMS 8. No tether. No LARS. 275 hours of dives.
Phantom DHD 2+2 ROV For Sale - Hull # 529. The previous owner had significant upgrades and servicing done to it in 2014. It was owned and operated by the Canadian Navy - Fleet Diving Unit - Atlantic. The ROV has been fully tested at a local University, it is fully operational and in exceptional condition with very low operating hours. Standard DOE front mounted camera. 2 X Deep Sea Power and Light (lights). Color Outland Pan and Tilt Camera. Rear mounted Deep Sea Power Mini Sea Cam. Tritech Altimeter. 1000-foot tether on DOE Stainless Steel Reel with slip-rings. 1000-foot DOE tether in a crate. 500-foot tether in a crate. 2 Spare DOE Half horsepower Thruster motors. Shipping crates for all the equipment. There is no topside console or related topside controls. These can be obtained from Deep Ocean Exploration and Research Marine in California.
VideoRay Scout. Delivered in two watertight rugged packing cases, and includes the ROV, 40m tether, Control Panel and basic tool kit. The Control Panel is identical for all models and includes a joy-stick and depth control knob, and 7” video display. Fixed forward-looking camera (no tilt, no manual focus) with variable intensity 20-watt halogen lights. Fitted with two 50 mm propellers and one vertical propeller, the Scout has full dive & swim capability.
Two x Hyball ROVs plus Spares. A very large amount of spare parts. plus 1 x standard Hyball and 1 x Offshore Hyball complete working units with umbilicals. From the spare parts another three ROVs could easily be built, and still have lots of spare parts left over.
VideoRay Pro 4. Developed over 10 years, the VideoRay Pro 4 is the most capable mini-ROV (Remotely Operated Vehicle) on the market. Lightweight and easy to deploy, the VideoRay Pro 4 is the easiest way to carry out most underwater inspection tasks. Depth rated to 305 metres, with powerful brushless thrusters, the Pro 4 can operate in extremely demanding conditions. The ROV includes bright LED lighting, a smart digital camera with tilt & focus and robust float block design. The Control Box includes a laptop PC with VideoRay Cockpit software which allows you to easily view and record video or sonar images. Cockpit also includes built-in system test features, and provides video overlay including date, time, heading, depth, GPS position and ROV operators own text. Pro 4 Ultra Base ROV with 40m Performance tether.
Magnum ROV for sale. Oceaneering Hydra Magnum 100P, built circa 2005. ROV only, no container, TMS or LARS. Possible to break for spares or sell as a complete unit. Length 8.5 ft, Width 4.8 ft, Height 6 ft, Weight in air: 4500 Ibs (estimated). Frame 6061 T6 Aluminium. Fittings 316 stainless steel. Payload: 500 Ibs. Power: 2 each 50 hp Hydraulic Power packs (100 hp). Propulsion: 2 x Fore/ Aft, 2 x Lateral, 2 x Vertical. Lighting 3 x ROS QL3000. Camera: 1 x Wide angle Low Light with ROS PT 10 Pan and tilt. Manipulators: 2 x ISE 7 function with 60” reach and 1000Ibs lift. Hydraulic tool controller. The only thing missing is the buoyancy tank.
POLLUX II ROV For sale. Length 880mm, Width 640mm, Height 530mm. Weight 83kg. Propulsion 4 brushless thruster motors (11kgf each). Max operative depth 400m. Auto depth, Auto heading. Video camera Sony ccd1/3” 380 lines. 2 x led lights 20W each. Chassis high density polypropylene with AISI 316 bolts and fixing system. Kevlar umbilical, 440 V power supply, 2 video lines, 2 spare lines. Portable Control Console (Explorer cases). Umbilical cable 150 meters. Technical Manual. Spare Parts Kit.
Triggerfish ROV. In working condition. Complete with 4 x thrusters (2 vertical, 2 horizontal). Lights, 3-Function Manipulator, Power Supply / Control Consolette. 100m+ Umbilical (red). XJS-04 Pilot Box, JW Fishers power/telemetry bottle for RMD-1 ROV mounted metal detector. It does not come with camera or sonar.
Hd2+2 ROV. In good condition. Complete with 7 x thrusters, PCU-78 Remote Pilot Box for HD2+2, Isolation Transformer for HD2+2, Umbilical with large 16 Pin connectors for HD2+2, Umbilical/Cable Reel with slip ring for HD2+2, 3-Function Manipulator. No control consolette box.
Mohawk ROV. In dive ready condition. With TMS, Control cabin, manipulator, sonar. No LARS. Built 2012, and with only 20 working hours. 1100 m lift umbilical.
SEAEYE 600 ROV for sale. This ROV is currently diving / working without any issues. It is in very good condition. This ROV has had several overhauls and a high level of maintenance during its life, including but not limited to replacement of thrusters. Complete and working Simrad MS900 Sonar. SONY TV Camera, and Camera Tilt mechanism. Side protections and polyurethane cover. Three Umbilicals. 1x300m, 2x200m. Spare parts.
Hydrovision Hyball System (For Sale). With Halogen tracking lights and external Halogens, High Res Colour Camera, Low light B/W, integration options for Sonar and other Sensors. Manipulator, 150m & 300m umbilical, (The System with about 20 hours work looks new and only Hydrovision has worked on it. Some spare parts.
PHANTOM HD2. This is an older ROV with four thrusters, and a Simrad Osprey colour zoom camera fitted, plus two lights. Complete with a HydroLec robotic/mechanical arm, two umbilical cables (plus winch), a deck unit and monitor in a flight case, deck control unit and all connecting cables. Various spares and three manuals.
H300 MKII - Inspection ROV. Depth rated to 300 m. Sufficient power and thrust to withstand sea currents up to at least 3 knots. High performance viewing system, with both a colour/zoom TV camera (mounted on a full Pan/Tilt unit) and a B/W very low light TV camera. Altimeter (with auto altitude function). Positioning system. High resolution digital still camera. Manipulator arm. Single and ergonomic hand controller for both the ROV and a 5 functions manipulator arm. Control unit incorporating the power supply unit, and offering a PC screen with either video only, or the combination of video, sonar display and digital still control. Dimensions (mm): 900 L x 470 H x 600 W. Weight in air: 70 kg excluding optional equipment. Material: polypropylene frame, stainless steel fittings.
Hyball Standard ROV system for sale. Dive ready and in excellent condition. Only 50 hours of use to date. New on-board JVC Camera, and a second Low light B/W Camera. Both fitted in 2003 by Hydrovision. 150m of Standard cable, and 300m of neutrally buoyant cable with it. Two spare thruster units. Manipulator. Also a Sonar connector (which would allow for a Tritech Seaprince Sonar with an old style Surface control unit (SCU3) to be purchased and fitted. Training course available.
Phantom ROV for sale.Deep Ocean XTL hull (#451) with a Phantom control unit. Equipped with two lights, depth sensor, compass, zoom camera with TPZ control. Includes two 500' tethers, and a booster box for the lights and a small spares kit. It is 110VAC, and was used for about a year and then stored. Good condition.
Contact us today, to discuss your submarine and Rov requirements. We are happy to offer a wide range of ideas and suggestions that will assist your underwater project.
SILVERCREST SUBMARINES Tel: England (+44) 1285.760620. E-mail: Sales@SilvercrestSubmarines.co.uk
NOTE. Heavy work class 150-300HP work class system We will shortly have a brand-new system available for sale. Price TBC.
NOTE. New inspection class ROVs available, all electric, our own build. Price subject to final specification. Please contact us for discussion.
Seaeye Falcon DR (MG). Comes with the distributed I/O system, and 1000m umbilical on a winch.
MOHAWK ROV (MG). A Frame LARS and TMS/Garage, 16’ Control Van/Workshop, Hydro-Lek Manip skid, Tritech Super SeaKing Sonar, Compact Colour Zoom Camera, Mono Low Lux CCD Camera, Comprehensive Spares Kit.
AC-ROV (Model SP-50). The smallest inspection class Rov in the market place (190mm fly through). The AC-ROV is more powerful, more robust and a more cost-effective solution than all other Rovs in its class. This Rov can hover, circle, rotate on its axis, and move in any direction the target requires. Operating depth of 75-100m. A total system carry-case weight of under 15kg. The unit has been designed for inspection in hazardous and confined areas. Rov Size: 203mm x 152mm x 146mm. Weight: 3kg. Camera: Colour CCD. Thrusters: 6 thrusters (4 x horizontal vectored, 2 x vertical). Lights: 4 cluster leds (variable intensity). System Power: 300 watt (0.4hp). Payload: 300g. Inputs: 90/260vac (47/63Hz) or 124/370vdc. System includes: AC-ROV, Control Unit, Tether Reel with 80m tether, Monitor, Space mouse control, Depth Sensor, Video Grabber cable - plugs into Laptop/PC for recording, Storm Case.This ROV System is as new, and delivered dive ready.
Triton XL. Workclass ROV recently refurbished to high standard. Complete system dive ready. Includes TMS. No 7F manipulator and no cameras or sonar (These can be supplied upon request).
Triton WL. Workclass ROV recently refurbished to high standard. Complete system, dive ready. Free swimmer system (no TMS, no 7F manipulator and no cameras or sonar). These can be supplied upon request
ROV V8Sii for sale. (Location Europe). This ROV is as new and in excellent condition. Depth 500m. Classified as a light intervention vehicle. included in the Sale is Micron Sonar, Typhoon Camera, 2 Halogen Lights, 4 additional HP LED lights (each 1600 Lumen). Strong Grabber with Grabber LED Light. Micron Sonar Protection. Top Rail. MicronNav Transponder bracket. 2nd Camera port. 300m Umbilical (Copper with additional Twisted Pair) on compact slip ring drum. Deck lead 20m. Power unit (overlay board new) in Pelicase Spares kit (O-rings, Fuses, etc.). Spare cables (few thruster cables, etc). 1 Spare Thruster. 1 Spare Propeller (new). Thruster brackets (new).
SeaBotix ROV for sale. 200 meter system with a protective bumper frame, and 250 meters of umbilical housed on a reel. Four thrusters to propel the ROV in different directions, including laterally. Thruster gain control which enables an operator to provide more or less power to the vehicle for a more stable/less twitchy flight. Control console's video overlay provides information such as trim, auto depth, auto heading, temperature, camera tilt and focus, and light intensity. The screen can be customized with the date/time/job. Two cameras, one black and white, and one color. A variable intensity light tracks with the primary camera. The cameras rotate up and down to provide a 270 degree field of view. Fiber optic video which is viewed on the monitor encased in the waterproof, control console. Built in auxiliary port which can be used for sonar or other instrumentation. Transport cases. (The following items can also be made available at additional cost if required: manipulator arm and cutting head attachment, Tritech sonar, Tritech MicronNav USBL tracking system, and LYYN video enhancer).
Argus Mariner XXL-50. Work Class ROV 2000m depth rating, available for sale. Dive ready. Complete with operating containers, LARS, TMS, plus other equipment and spares as per specs sheet. Ideal for a wide range of tasks; survey, IRM, Drilling support, Free span corrections, Touchdown monitoring, Pipe laying support, Pipeline inspections.
Cougar XT ROV for Sale. ROV Cougar XT S/N 1424 with tool skid, 2 x Hydrolek manipulator/grabber, Seaeye B&W + Colour cameras. Purchased 2008. Includes Control Cabin Zone II, TMS 8. No tether. No LARS. 275 hours of dives.
Phantom DHD 2+2 ROV For Sale - Hull # 529. The previous owner had significant upgrades and servicing done to it in 2014. It was owned and operated by the Canadian Navy - Fleet Diving Unit - Atlantic. The ROV has been fully tested at a local University, it is fully operational and in exceptional condition with very low operating hours. Standard DOE front mounted camera. 2 X Deep Sea Power and Light (lights). Color Outland Pan and Tilt Camera. Rear mounted Deep Sea Power Mini Sea Cam. Tritech Altimeter. 1000 foot tether on DOE Stainless Steel Reel with slip-rings. 1000 foot DOE tether in a crate. 500 foot tether in a crate. 2 Spare DOE Half horsepower Thruster motors. Shipping crates for all the equipment. There is no topside console or related topside controls. These can be obtained from Deep Ocean Exploration and Research Marine in California. VideoRay Scout. Delivered in two watertight rugged packing cases, and includes the ROV, 40m tether, Control Panel and basic tool kit. The Control Panel is identical for all models and includes a joy-stick and depth control knob, and 7” video display. Fixed forward-looking camera (no tilt, no manual focus) with variable intensity 20-watt halogen lights. Fitted with two 50 mm propellers and one vertical propeller, the Scout has full dive & swim capability.
Two x Hyball ROVs plus Spares. A very large amount of spare parts. plus 1 x standard Hyball and 1 x Offshore Hyball complete working units with umbilicals. From the spare parts another three ROVs could easily be built, and still have lots of spare parts left over.
VideoRay Pro 4. Developed over 10 years, the VideoRay Pro 4 is the most capable mini-ROV (Remotely Operated Vehicle) on the market. Lightweight and easy to deploy, the VideoRay Pro 4 is the easiest way to carry out most underwater inspection tasks. Depth rated to 305 metres, with powerful brushless thrusters, the Pro 4 can operate in extremely demanding conditions. The ROV includes bright LED lighting, a smart digital camera with tilt & focus and robust float block design. The Control Box includes a laptop PC with VideoRay Cockpit software which allows you to easily view and record video or sonar images. Cockpit also includes built-in system test features, and provides video overlay including date, time, heading, depth, GPS position and ROV operators own text. Pro 4 Ultra Base ROV with 40m Performance tether.
Magnum ROV for sale. Oceaneering Hydra Magnum 100P, built circa 2005. ROV only, no container, TMS or LARS. Possible to break for spares or sell as a complete unit. Length 8.5 ft, Width 4.8 ft, Height 6 ft, Weight in air: 4500 Ibs (estimated). Frame 6061 T6 Aluminium. Fittings 316 stainless steel. Payload: 500 Ibs. Power: 2 each 50 hp Hydraulic Power packs (100 hp). Propulsion: 2 x Fore/ Aft, 2 x Lateral, 2 x Vertical. Lighting 3 x ROS QL3000. Camera: 1 x Wide angle Low Light with ROS PT 10 Pan and tilt. Manipulators: 2 x ISE 7 function with 60” reach and 1000Ibs lift. Hydraulic tool controller. The only thing missing is the buoyancy tank.
POLLUX II ROV For sale. Length 880mm, Width 640mm, Height 530mm. Weight 83kg. Propulsion 4 brushless thruster motors (11kgf each). Max operative depth 400m. Auto depth, Auto heading. Video camera Sony ccd1/3” 380 lines. 2 x led lights 20W each. Chassis high density polypropylene with AISI 316 bolts and fixing system. Kevlar umbilical, 440 V power supply, 2 video lines, 2 spare lines. Portable Control Console (Explorer cases). Umbilical cable 150 meters. Technical Manual. Spare Parts Kit
Triggerfish ROV. In working condition. Complete with 4 x thrusters (2 vertical, 2 horizontal). Lights, 3-Function Manipulator, Power Supply / Control Consolette. 100m+ Umbilical (red). XJS-04 Pilot Box, JW Fishers power/telemetry bottle for RMD-1 ROV mounted metal detector. It does not come with camera or sonar.
Hd2+2 ROV. In good condition. Complete with 7 x thrusters, PCU-78 Remote Pilot Box for HD2+2, Isolation Transformer for HD2+2, Umbilical with large 16 Pin connectors for HD2+2, Umbilical/Cable Reel with slip ring for HD2+2, 3-Function Manipulator. No control consolette box.
Mohawk ROV. In dive ready condition. With TMS, Control cabin, manipulator, sonar. No LARS. Built 2012, and with only 20 working hours. 1100 m lift umbilical..
SEAEYE 600 ROV for sale. This ROV is currently diving / working without any issues. It is in very good condition. This ROV has had several overhauls and a high level of maintenance during its life, including but not limited to replacement of thrusters. Complete and working Simrad MS900 Sonar. SONY TV Camera, and Camera Tilt mechanism. Side protections and polyurethane cover. Three Umbilicals. 1x300m, 2x200m. Spare parts.
Hydrovision Hyball System (For Sale). With Halogen tracking lights and external Halogens, High Res Colour Camera, Low light B/W, integration options for Sonar and other Sensors. Manipulator, 150m & 300m umbilical, (The System with about 20 hours work looks new and only Hydrovision has worked on it. Some spare parts.
PHANTOM HD2. This is an older ROV with four thrusters, and a Simrad Osprey colour zoom camera fitted, plus two lights. Complete with a HydroLec robotic/mechanical arm, two umbilical cables (plus winch), a deck unit and monitor in a flight case, deck control unit and all connecting cables. Various spares and three manuals.
H300 MKII - Inspection ROV. Depth rated to 300 m. Sufficient power and thrust to withstand sea currents up to at least 3 knots. High performance viewing system, with both a colour/zoom TV camera (mounted on a full Pan/Tilt unit) and a B/W very low light TV camera. Altimeter (with auto altitude function). Positioning system. High resolution digital still camera. Manipulator arm. Single and ergonomic hand controller for both the ROV and a 5 functions manipulator arm. Control unit incorporating the power supply unit, and offering a PC screen with either video only, or the combination of video, sonar display and digital still control. Dimensions (mm): 900 L x 470 H x 600 W. Weight in air: 70 kg excluding optional equipment. Material: polypropylene frame, stainless steel fittings.
Hyball Standard ROV system for sale. Dive ready and in excellent condition. Only 50 hours of use to date. New on-board JVC Camera, and a second Low light B/W Camera. Both fitted in 2003 by Hydrovision. 150m of Standard cable, and 300m of neutrally buoyant cable with it. Two spare thruster units. Manipulator. Also a Sonar connector (which would allow for a Tritech Seaprince Sonar with an old style Surface control unit (SCU3) to be purchased and fitted. Training course available.
Phantom ROV for sale. Deep Ocean XTL hull (#451) with a Phantom control unit. Equipped with two lights, depth sensor, compass, zoom camera with TPZ control. Includes two 500' tethers, and a booster box for the lights and a small spares kit. It is 110VAC, and was used for about a year and then stored. Good condition. Email: sales@silvercrestsubmarines.com AC-ROV (Model SP-50) for Sale.
Dive ready. The smallest inspection class Rov in the market place (190mm fly through). The AC-ROV is more powerful, more robust and a more cost effective solution than all other Rovs in its class. This Rov can hover, circle, rotate on its axis, and move in any direction the target requires. Operating depth of 75-100m.
A total system carry-case weight of under 15kg. The unit has been designed for inspection in hazardous and confined areas. Rov Size: 203mm x 152mm x 146mm. Weight: 3kg. Camera: Colour CCD. Thrusters: 6 thrusters (4 x horizontal vectored, 2 x vertical). Lights: 4 cluster leds (variable intensity). System Power: 300 watt (0.4hp). Payload: 300g. Inputs: 90/260vac (47/63Hz) or 124/370vdc.
System includes: AC-ROV, Control Unit, Tether Reel with 80m tether, Monitor, Space mouse control. This ROV System is in excellent condition, and delivered dive ready.
Cougar XT ROV for Sale. ROV Cougar XT S/N 1424 with tool skid, 2 x Hydrolek manipulator/grabber, Seaeye B&W + Colour cameras. Purchased 2008. Includes Control Cabin Zone II, TMS 8. No tether. No LARS. 275 hours of dives. Also for sale if required:
SeaBotix ROV for sale. 200 meter system with a protective bumper frame, and 250 meters of umbilical housed on a reel. Four thrusters to propel the ROV in different directions, including laterally. Thruster gain control which enables an operator to provide more or less power to the vehicle for a more stable/less twitchy flight. Control console's video overlay provides information such as trim, auto depth, auto heading, temperature, camera tilt and focus, and light intensity. The screen can be customized with the date/time/job. Two cameras, one black and white, and one colour. A variable intensity light tracks with the primary camera. The cameras rotate up and down to provide a 270 degree field of view. Fibre optic video which is viewed on the monitor encased in the waterproof, control console. Built in auxiliary port which can be used for sonar or other instrumentation. Transport cases.
R’S FOR CHARTER.
Tiger ROV for charter. Complete with TMS, Lars and support container. Manipulator arm, Tritech sonar, 1000m depth rating. Please contact us for details.
Seabotix 200 L for charter. With High Res Colour and low light B/W Camera, Sonar, Manipulator, High Power Camera tracking LED, 4 x high power External LEDs, brushless motors, 286m Fibre Optics, cable on Slip-ring Drum,
Seamor 300F2/4 for charter. With 915m F/O cable on Slip-ring drum, and 2000m F/O cable on motorized slip-ring drum. High resolution Colour Camera with 2 Halogen Tracking lights. Additional high power LEDs, Grabber, Option to fit Sonar Profiler or obstacle avoidance Sonar (both with measuring function and multiple range and resolution settings). Rear camera and LEDs. This Rov is a purpose built tunnel inspection vehicle and has two additional rearward thrusters to be able to pull the 2000m umbilical.
Ocean Modules V8Sii for charter. With High Res Colour Typhoon camera, 2 x Halogen , 4 x High Power LEDs, rear / endoscopic / manip camera, Grabber, Cutter. Option to fit Sonar Profiler or obstacle avoidance Sonar (both with measuring function and multiple range and resolution settings). Option for External Sensor Integration, side scan sonar. 300m Copper Umbilical on Slip-ring drum. 650m loose cable available, if longer penetration is required.
ROV’S FOR IMMEDIATE SALE.
AC-ROV (Model SP-50). The smallest inspection class Rov in the market place (190mm fly through). The AC-ROV is more powerful, more robust and a more cost effective solution than all other Rovs in its class. This Rov can hover, circle, rotate on its axis, and move in any direction the target requires. Operating depth of 75-100m. A total system carry-case weight of under 15kg. The unit has been designed for inspection in hazardous and confined areas. Rov Size: 203mm x 152mm x 146mm. Weight: 3kg. Camera: Colour CCD. Thrusters: 6 thrusters (4 x horizontal vectored, 2 x vertical). Lights: 4 cluster leds (variable intensity). System Power: 300 watt (0.4hp). Payload: 300g. Inputs: 90/260vac (47/63Hz) or 124/370vdc. System includes: AC-ROV, Control Unit, Tether Reel with 80m tether, Monitor, Space mouse control, Depth Sensor, Video Grabber cable - plugs into Laptop/PC for recording, Storm Case.This ROV System is as new, and delivered dive ready.
Argus Mariner XXL-50. Work Class ROV 2000m depth rating, available for sale. Dive ready. Complete with operating containers, LARS, TMS, plus other equipment and spares as per specs sheet. Ideal for a wide range of tasks; survey, IRM, Drilling support, Free span corrections, Touchdown monitoring, Pipe laying support, Pipeline inspections.
Cougar XT ROV for Sale. ROV Cougar XT S/N 1424 with tool skid, 2 x Hydrolek manipulator/grabber, Seaeye B&W + Colour cameras. Purchased 2008. Includes Control Cabin Zone II, TMS 8. No tether. No LARS. 275 hours of dives.
SeaBotix ROV for sale. 200 meter system with a protective bumper frame, and 250 meters of umbilical housed on a reel. Four thrusters to propel the ROV in different directions, including laterally. Thruster gain control which enables an operator to provide more or less power to the vehicle for a more stable/less twitchy flight. Control console's video overlay provides information such as trim, auto depth, auto heading, temperature, camera tilt and focus, and light intensity. The screen can be customized with the date/time/job. Two cameras, one black and white, and one color. A variable intensity light tracks with the primary camera. The cameras rotate up and down to provide a 270 degree field of view. Fiber optic video which is viewed on the monitor encased in the waterproof, control console. Built in auxiliary port which can be used for sonar or other instrumentation. Transport cases. (The following items can also be made available at additional cost if required: manipulator arm and cutting head attachment, Tritech sonar, Tritech MicronNav USBL tracking system, and LYYN video enhancer).
ROV V8Sii for sale. (Location Europe). This ROV is as new and in excellent condition. Depth 500m. Classified as a light intervention vehicle. included in the Sale is Micron Sonar, Typhoon Camera, 2 Halogen Lights, 4 additional HP LED lights (each 1600 Lumen). Strong Grabber with Grabber LED Light. Micron Sonar Protection. Top Rail. MicronNav Transponder bracket. 2nd Camera port. 300m Umbilical (Copper with additional Twisted Pair) on compact slip ring drum. Deck lead 20m. Power unit (overlay board new) in Pelicase Spares kit (O-rings, Fuses, etc.). Spare cables (few thruster cables ,etc). 1 Spare Thruster. 1 Spare Propeller (new). Thruster brackets (new).
Phantom DHD 2+2 ROV For Sale - Hull # 529. The previous owner had significant upgrades and servicing done to it in 2014. It was owned and operated by the Canadian Navy - Fleet Diving Unit - Atlantic. The ROV has been fully tested at a local University, it is fully operational and in exceptional condition with very low operating hours. Standard DOE front mounted camera. 2 X Deep Sea Power and Light (lights). Color Outland Pan and Tilt Camera. Rear mounted Deep Sea Power Mini Sea Cam. Tritech Altimeter. 1000 foot tether on DOE Stainless Steel Reel with slip-rings. 1000 foot DOE tether in a crate. 500 foot tether in a crate. 2 Spare DOE Half horsepower Thruster motors. Shipping crates for all the equipment. There is no topside console or related topside controls. These can be obtained from Deep Ocean Exploration and Research Marine in California.
VideoRay Scout. Delivered in two watertight rugged packing cases, and includes the ROV, 40m tether, Control Panel and basic tool kit. The Control Panel is identical for all models and includes a joy-stick and depth control knob, and 7” video display. Fixed forward-looking camera (no tilt, no manual focus) with variable intensity 20-watt halogen lights. Fitted with two 50 mm propellers and one vertical propeller, the Scout has full dive & swim capability.
VideoRay Pro 4. Developed over 10 years, the VideoRay Pro 4 is the most capable mini-ROV (Remotely Operated Vehicle) on the market. Lightweight and easy to deploy, the VideoRay Pro 4 is the easiest way to carry out most underwater inspection tasks. Depth rated to 305 metres, with powerful brushless thrusters, the Pro 4 can operate in extremely demanding conditions. The ROV includes bright LED lighting, a smart digital camera with tilt & focus and robust float block design. The Control Box includes a laptop PC with VideoRay Cockpit software which allows you to easily view and record video or sonar images. Cockpit also includes built-in system test features, and provides video overlay including date, time, heading, depth, GPS position and ROV operators own text. Pro 4 Ultra Base ROV with 40m Performance tether.
Two x Hyball ROVs plus Spares. A very large amount of spare parts. plus 1 x standard Hyball and 1 x Offshore Hyball complete working units with umbilicals. From the spare parts another three ROVs could easily be built, and still have lots of spare parts left over.
Magnum ROV for sale. Oceaneering Hydra Magnum 100P, built circa 2005. ROV only, no container, TMS or LARS. Possible to break for spares or sell as a complete unit. Length 8.5 ft, Width 4.8 ft, Height 6 ft, Weight in air: 4500 Ibs (estimated). Frame 6061 T6 Aluminium. Fittings 316 stainless steel. Payload: 500 Ibs. Power: 2 each 50 hp Hydraulic Power packs (100 hp). Propulsion: 2 x Fore/ Aft, 2 x Lateral, 2 x Vertical. Lighting 3 x ROS QL3000. Camera: 1 x Wide angle Low Light with ROS PT 10 Pan and tilt. Manipulators: 2 x ISE 7 function with 60” reach and 1000Ibs lift. Hydraulic tool controller. The only thing missing is the buoyancy tank.
POLLUX II ROV For sale. Length 880mm, Width 640mm, Height 530mm. Weight 83kg. Propulsion 4 brushless thruster motors (11kgf each). Max operative depth 400m. Auto depth, Auto heading. Video camera Sony ccd1/3” 380 lines. 2 x led lights 20W each. Chassis high density polypropylene with AISI 316 bolts and fixing system. Kevlar umbilical, 440 V power supply, 2 video lines, 2 spare lines. Portable Control Console (Explorer cases). Umbilical cable 150 meters. Technical Manual. Spare Parts Kit.
Work Class ROV QXP25 for sale. This is a new ROV and LARS that is dive ready. The ROV was never used, and is part of a Quick Response Barge design to confine oil spills. Includes: ROV QXP25, Winch / umbilical, LARS, Hydraulic Unit to power the winch/ROV. Spare parts value USD 300,000 including an additional LARS, spare 200 HP motor, Thrusters, mechanical arms, etc. Builder: SMD Hydrovision Limited. Class Society: Lloyds Register of Shipping. Depth Rating: 3000m of seawater. Hydraulic Power 200 HP (Option for 230HP).
Triggerfish ROV. In working condition. Complete with 4 x thrusters (2 vertical , 2 horizontal). Lights, 3-Function Manipulator, Power Supply / Control Consolette. 100m+ Umbilical (red). XJS-04 Pilot Box, JW Fishers power/telemetry bottle for RMD-1 ROV mounted metal detector. It does not come with camera or sonar.
Hd2+2 ROV. In good condition. Complete with 7 x thrusters, PCU-78 Remote Pilot Box for HD2+2, Isolation Transformer for HD2+2, Umbilical with large 16 Pin connectors for HD2+2, Umbilical/Cable Reel with slip ring for HD2+2, 3-Function Manipulator. No control consolette box.
Mohawk ROV. In dive ready condition. With TMS, Control cabin, manipulator, sonar. No LARS. Built 2012, and with only 20 working hours. 1100 m lift umbilical.
SEAEYE 600 ROV for sale. This ROV is currently diving / working without any issues. It is in very good condition. This ROV has had several overhauls and a high level of maintenance during its life, including but not limited to replacement of thrusters. Complete and working Simrad MS900 Sonar. SONY TV Camera, and Camera Tilt mechanism. Side protections and polyurethane cover. Three Umbilicals. 1x300m, 2x200m. Spare parts.
Mohawk ROV. In dive ready condition. With TMS, Control cabin, manipulator, sonar. No LARS. Built 2012, and with only 20 working hours. 1100 m lift umbilical.
Hydrovision Hyball System (For Sale). With Halogen tracking lights and external Halogens, High Res Colour Camera, Low light B/W, integration options for Sonar and other Sensors. Manipulator, 150m & 300m umbilical, (The System with about 20 hours work looks new and only Hydrovision has worked on it. Some spare parts.
PHANTOM HD2. This is an older ROV with four thrusters, and a Simrad Osprey colour zoom camera fitted, plus two lights. Complete with a HydroLec robotic/mechanical arm, two umbilical cables (plus winch), a deck unit and monitor in a flight case, deck control unit and all connecting cables. Various spares and three manuals.
H300 MKII - Inspection ROV. Depth rated to 300 m. Sufficient power and thrust to withstand sea currents up to at least 3 knots. High performance viewing system, with both a colour/zoom TV camera (mounted on a full Pan/Tilt unit) and a B/W very low light TV camera. Altimeter (with auto altitude function) . Positioning system. High resolution digital still camera. Manipulator arm. Single and ergonomic hand controller for both the ROV and a 5 functions manipulator arm. Control unit incorporating the power supply unit, and offering a PC screen with either video only, or the combination of video, sonar display and digital still control. Dimensions (mm) : 900 L x 470 H x 600 W. Weight in air : 70 kg excluding optional equipment. Material : polypropylene frame, stainless steel fittings.
Hyball Standard ROV system for sale. Dive ready and in excellent condition. Only 50 hours of use to date. New on-board JVC Camera, and a second Low light B/W Camera. Both fitted in 2003 by Hydrovision. 150m of Standard cable, and 300m of neutrally buoyant cable with it. Two spare thruster units. Manipulator. Also a Sonar connector (which would allow for a Tritech Seaprince Sonar with an old style Surface control unit (SCU3) to be purchased and fitted. Training course available..
Phantom ROV for sale. Deep Ocean XTL hull (#451) with a Phantom control unit. Equipped with two lights, depth sensor, compass, zoom camera with TPZ control. Includes two 500' tethers, and a booster box for the lights and a small spares kit. It is 110VAC, and was used for about a year and then stored. Good condition.
AC-ROV (Model SP-50). The smallest inspection class Rov in the market place (190mm fly through). The AC-ROV is more powerful, more robust and a more cost effective solution than all other Rovs in its class. This Rov can hover, circle, rotate on its axis, and move in any direction the target requires. Operating depth of 75-100m. A total system carry-case weight of under 15kg. The unit has been designed for inspection in hazardous and confined areas. Rov Size: 203mm x 152mm x 146mm. Weight: 3kg. Camera: Colour CCD. Thrusters: 6 thrusters (4 x horizontal vectored, 2 x vertical). Lights: 4 cluster leds (variable intensity). System Power: 300 watt (0.4hp). Payload: 300g. Inputs: 90/260vac (47/63Hz) or 124/370vdc. System includes: AC-ROV, Control Unit, Tether Reel with 80m tether, Monitor, Space mouse control, Depth Sensor, Video Grabber cable - plugs into Laptop/PC for recording, Storm Case.This ROV System is as new, and delivered dive ready.
Argus Mariner XXL-50. Work Class ROV 2000m depth rating, available for sale. Dive ready. Complete with operating containers, LARS, TMS, plus other equipment and spares as per specs sheet. Ideal for a wide range of tasks; survey, IRM, Drilling support, Free span corrections, Touchdown monitoring, Pipe laying support, Pipeline inspections.
Cougar XT ROV for Sale. ROV Cougar XT S/N 1424 with tool skid, 2 x Hydrolek manipulator/grabber, Seaeye B&W + Colour cameras. Purchased 2008. Includes Control Cabin Zone II, TMS 8. No tether. No LARS. 275 hours of dives.
SeaBotix ROV for sale. 200 meter system with a protective bumper frame, and 250 meters of umbilical housed on a reel. Four thrusters to propel the ROV in different directions, including laterally. Thruster gain control which enables an operator to provide more or less power to the vehicle for a more stable/less twitchy flight. Control console's video overlay provides information such as trim, auto depth, auto heading, temperature, camera tilt and focus, and light intensity. The screen can be customized with the date/time/job. Two cameras, one black and white, and one color. A variable intensity light tracks with the primary camera. The cameras rotate up and down to provide a 270 degree field of view. Fiber optic video which is viewed on the monitor encased in the waterproof, control console. Built in auxiliary port which can be used for sonar or other instrumentation. Transport cases. (The following items can also be made available at additional cost if required: manipulator arm and cutting head attachment, Tritech sonar, Tritech MicronNav USBL tracking system, and LYYN video enhancer).
ROV V8Sii for sale. (Location Europe). This ROV is as new and in excellent condition. Depth 500m. Classified as a light intervention vehicle. included in the Sale is Micron Sonar, Typhoon Camera, 2 Halogen Lights, 4 additional HP LED lights (each 1600 Lumen). Strong Grabber with Grabber LED Light. Micron Sonar Protection. Top Rail. MicronNav Transponder bracket. 2nd Camera port. 300m Umbilical (Copper with additional Twisted Pair) on compact slip ring drum. Deck lead 20m. Power unit (overlay board new) in Pelicase Spares kit (O-rings, Fuses, etc.). Spare cables (few thruster cables ,etc). 1 Spare Thruster. 1 Spare Propeller (new). Thruster brackets (new). Phantom DHD 2+2 ROV For Sale - Hull # 529. The previous owner had significant upgrades and servicing done to it in 2014. It was owned and operated by the Canadian Navy - Fleet Diving Unit - Atlantic. The ROV has been fully tested at a local University, it is fully operational and in exceptional condition with very low operating hours. Standard DOE front mounted camera. 2 X Deep Sea Power and Light (lights). Color Outland Pan and Tilt Camera. Rear mounted Deep Sea Power Mini Sea Cam. Tritech Altimeter. 1000 foot tether on DOE Stainless Steel Reel with slip-rings. 1000 foot DOE tether in a crate. 500 foot tether in a crate. 2 Spare DOE Half horsepower Thruster motors. Shipping crates for all the equipment. There is no topside console or related topside controls. These can be obtained from Deep Ocean Exploration and Research Marine in California.
VideoRay Scout. Delivered in two watertight rugged packing cases, and includes the ROV, 40m tether, Control Panel and basic tool kit. The Control Panel is identical for all models and includes a joy-stick and depth control knob, and 7” video display. Fixed forward-looking camera (no tilt, no manual focus) with variable intensity 20-watt halogen lights. Fitted with two 50 mm propellers and one vertical propeller, the Scout has full dive & swim capability.
VideoRay Pro 4. Developed over 10 years, the VideoRay Pro 4 is the most capable mini-ROV (Remotely Operated Vehicle) on the market. Lightweight and easy to deploy, the VideoRay Pro 4 is the easiest way to carry out most underwater inspection tasks. Depth rated to 305 metres, with powerful brushless thrusters, the Pro 4 can operate in extremely demanding conditions. The ROV includes bright LED lighting, a smart digital camera with tilt & focus and robust float block design. The Control Box includes a laptop PC with VideoRay Cockpit software which allows you to easily view and record video or sonar images. Cockpit also includes built-in system test features, and provides video overlay including date, time, heading, depth, GPS position and ROV operators own text. Pro 4 Ultra Base ROV with 40m Performance tether.
Two x Hyball ROVs plus Spares. A very large amount of spare parts. plus 1 x standard Hyball and 1 x Offshore Hyball complete working units with umbilicals. From the spare parts another three ROVs could easily be built, and still have lots of spare parts left over.
Magnum ROV for sale. Oceaneering Hydra Magnum 100P, built circa 2005. ROV only, no container, TMS or LARS. Possible to break for spares or sell as a complete unit. Length 8.5 ft, Width 4.8 ft, Height 6 ft, Weight in air: 4500 Ibs (estimated). Frame 6061 T6 Aluminium. Fittings 316 stainless steel. Payload: 500 Ibs. Power: 2 each 50 hp Hydraulic Power packs (100 hp). Propulsion: 2 x Fore/ Aft, 2 x Lateral, 2 x Vertical. Lighting 3 x ROS QL3000. Camera: 1 x Wide angle Low Light with ROS PT 10 Pan and tilt. Manipulators: 2 x ISE 7 function with 60” reach and 1000Ibs lift. Hydraulic tool controller. The only thing missing is the buoyancy tank.
POLLUX II ROV For sale. Length 880mm, Width 640mm, Height 530mm. Weight 83kg. Propulsion 4 brushless thruster motors (11kgf each). Max operative depth 400m. Auto depth, Auto heading. Video camera Sony ccd1/3” 380 lines. 2 x led lights 20W each. Chassis high density polypropylene with AISI 316 bolts and fixing system. Kevlar umbilical, 440 V power supply, 2 video lines, 2 spare lines. Portable Control Console (Explorer cases). Umbilical cable 150 meters. Technical Manual. Spare Parts Kit.
Work Class ROV QXP25 for sale. This is a new ROV and LARS that is dive ready. The ROV was never used, and is part of a Quick Response Barge design to confine oil spills. Includes: ROV QXP25, Winch / umbilical, LARS, Hydraulic Unit to power the winch/ROV. Spare parts value USD 300,000 including an additional LARS, spare 200 HP motor, Thrusters, mechanical arms, etc. Builder: SMD Hydrovision Limited. Class Society: Lloyds Register of Shipping. Depth Rating: 3000m of seawater. Hydraulic Power 200 HP (Option for 230HP). Triggerfish ROV. In working condition. Complete with 4 x thrusters (2 vertical , 2 horizontal). Lights, 3-Function Manipulator, Power Supply / Control Consolette. 100m+ Umbilical (red). XJS-04 Pilot Box, JW Fishers power/telemetry bottle for RMD-1 ROV mounted metal detector. It does not come with camera or sonar.
Hd2+2 ROV. In good condition. Complete with 7 x thrusters, PCU-78 Remote Pilot Box for HD2+2, Isolation Transformer for HD2+2, Umbilical with large 16 Pin connectors for HD2+2, Umbilical/Cable Reel with slip ring for HD2+2, 3-Function Manipulator. No control consolette box.
Mohawk ROV. In dive ready condition. With TMS, Control cabin, manipulator, sonar. No LARS. Built 2012, and with only 20 working hours. 1100 m lift umbilical.
Hydrovision Hyball System (For Sale). With Halogen tracking lights and external Halogens, High Res Colour Camera, Low light B/W, integration options for Sonar and other Sensors. Manipulator, 150m & 300m umbilical, (The System with about 20 hours work looks new and only Hydrovision has worked on it. Some spare parts.
PHANTOM HD2. This is an older ROV with four thrusters, and a Simrad Osprey colour zoom camera fitted, plus two lights. Complete with a HydroLec robotic/mechanical arm, two umbilical cables (plus winch), a deck unit and monitor in a flight case, deck control unit and all connecting cables. Various spares and three manuals.
H300 MKII - Inspection ROV. Depth rated to 300 m. Sufficient power and thrust to withstand sea currents up to at least 3 knots. High performance viewing system, with both a colour/zoom TV camera (mounted on a full Pan/Tilt unit) and a B/W very low light TV camera. Altimeter (with auto altitude function) . Positioning system. High resolution digital still camera. Manipulator arm. Single and ergonomic hand controller for both the ROV and a 5 functions manipulator arm. Control unit incorporating the power supply unit, and offering a PC screen with either video only, or the combination of video, sonar display and digital still control. Dimensions (mm) : 900 L x 470 H x 600 W. Weight in air : 70 kg excluding optional equipment. Material : polypropylene frame, stainless steel fittings.
Hyball Standard ROV system for sale. Dive ready and in excellent condition. Only 50 hours of use to date. New on-board JVC Camera, and a second Low light B/W Camera. Both fitted in 2003 by Hydrovision. 150m of Standard cable, and 300m of neutrally buoyant cable with it. Two spare thruster units. Manipulator. Also a Sonar connector (which would allow for a Tritech Seaprince Sonar with an old style Surface control unit (SCU3) to be purchased and fitted. Training course available.
Phantom ROV for sale. Deep Ocean XTL hull (#451) with a Phantom control unit. Equipped with two lights, depth sensor, compass, zoom camera with TPZ control. Includes two 500' tethers, and a booster box for the lights and a small spares kit. It is 110VAC, and was used for about a year and then stored. Good condition.
SUBMARINES FOR CHARTER. a) TRITON Submersibles. We have two Triton 1000/2 submersibles with experienced crews available for charter. These units are based on a super yacht that can mobilise to any worldwide diving location requested. Ideal for scientific research, underwater exploration, wreck hunting, filming, and just for fun. b) PERRY Submersible. c) Other submarines subject to availability.
SUBMARINES FOR SALE.
We have a wide range of submarines (big and small) for sale and possible charter. Priced to suit all budgets and tasks. For example, we have for sale in excellent condition, a four-man (1000ft depth rated) submersible with diver lockout facility. We also have available a range of multi passenger tourist submarines (ten to forty passenger). Small two / three man submersibles, and one-man ADS units. Contact us at anytime to discuss the options and to exchange ideas.
Pilot training and maintenance courses can be arranged to support every submarine sale. We can arrange shipping direct to your hometown on request.
MEDIUM TOURIST SUBMARINE (Immediately available). A medium size multi-passenger tourist submarine, designed for the underwater leisure market. Operating Depth: 300ft (100m). Weight: 35 tons. Crew: Two pilots and twenty-four passengers. Large viewports on all sides. Air conditioning, external lights, communications, video and sonar.
Sub- Surface Viewing Craft (Explorer). A revolutionary new self-propelled, sub-surface viewing pod that sits 1.2m underwater, below the ocean surface. No specialist dive training is required to use the Explorer, which offers a clear, unobstructed and comfortable view of the undersea environment. Ideal for hotels and resorts, super-yachts, commercial surveying, marine research, film and broadcast production. Easily controlled by single or dual joystick. It has an all-day operating capacity (7.5 hours operation at full speed) allowing for a full working day underwater, and a truly unique experience for users. Explorers are small electrically powered, dry cockpit, surface water craft, purpose designed to provide time unlimited, unobstructed, sub surface 360 degree passive observation of marine life or shallow reef, during night or day.
T-Sub For Sale. A small tourist submarine, 16-passenger, 100-meter operational depth. Constructed by Sulzer in Switzerland. Large viewports, Luxury leather seating, advanced control and navigation system, air conditioning and life support system. Ideal for subsea tourism (T-sub), or as a personal luxury submarine for private use.
PERRY SUBMARINE-14 (ONE ATMOSPHERE). A one-atmosphere submersible designed for all commercial activities, scientific research, underwater filming, search and salvage. Crew: three. Operational Depth: 1200ft. Weight: 5 tons. One large front viewport, plus six small conning tower viewports. Fitted with external lighting, manipulator arm, communications and sonar system.
PERRY SUBMARINE-18 (Diver Lock-out). A diver lockout submersible designed for all commercial activities, scientific research, underwater filming, search and salvage. Crew: three. Operational Depth: 1000ft. Weight: 8 tons. One large front viewport, plus six small conning tower viewports. Fitted with external lighting, manipulator arm, communications and sonar system.
WSUB(PB) TOURIST SUBMARINE FOR SALE. A large multi-passenger tourist submarine in excellent condition, together with two very good surface vessels, and a full stock of spares and other items. This submarine is the last Mark 3, build 14. Built in 1993, but was stored until 2007. An excellent opportunity to acquire a purpose built submarine. Operating Depth: 240ft (75m). Weight: 105 tons. Crew: Two pilots and forty-eight passengers. Large viewports. External lights, video, and communications.
LARGE TOURIST SUBMARINE W-Sub (K). A large multi-passenger tourist submarine designed for the underwater leisure market. To be delivered newly refitted and dive ready. An excellent opportunity to acquire a purpose built submarine. Operating Depth: 240ft (75m). Weight: 105 tons. Crew: Two pilots and forty-eight passengers. Large viewports. External lights, video, and communications.
SUB-SCOOTER. A Sub-scooter, that is easy to use and operate. Ideal for super-yachts, tourist resorts and underwater leisure activities. No experience required. Comfortable seats. Air is breathed from inside an acrylic dome that offers panoramic viewing. Maximum speed of two knots. Easy launch and recovery. Low operating costs. Length: 1.7m. Width: 650mm. Height: 1400mm. Weight: 80Kg.
MINI SEMI-SUBMERSIBLE. This is the world's first Compact two-man Semi-submersible, with cutting-edge design and technology. Step down into an underwater observatory and simply drive on the surface. Navigate where you want to go. It's safe, easy and comfortable. Undersea discovery is in your control. It is neither submarine nor glass bottom boat. The innovative design combines these two technologies to give you an experience that surpasses both. Beneath ample deck space is an underwater glass observatory equipped with state-of-the-art technology. Smooth driving performance is coupled with a clear view of undersea life. 100% electric with zero emissions, the semi-sub is equipped with a brushless DC electric motor that is quiet and powerful. Equipped with a high-resolution TFT-LCD monitor. You can view and monitor high quality images at all times. The Digital LED Battery Gauge shows the current remaining amount of battery. Smart Charging System (PLUG-IN AT DOCK). Digital Depth Sounder and VHF communications.
SPORTSUB. An ambient-pressure two-man wet submersible that incorporates the dynamics of both flying and scuba diving. Constructed from fiberglass, the Sportsub can travel through the water further and faster than scuba divers, and has a dive duration of approximately three hours (limited by Dive Tables). Operating Depth: 120ft (40m). Crew: two. Weight: 0.5 ton. Viewing through acrylic viewports. Exit and re-entry underwater possible for trained scuba divers. Non-divers can travel in the Sportsub as passenger. Easy to operate and maintain. Pilot training course available. Excellent condition and dive ready.
SPECIAL FORCES SDV. Designed and manufactured for military special forces, the SF- SDV is a hybrid Surface and Underwater Swimmer Delivery Vehicle capable of 35kts on the surface , and 5kts underwater. The SF-SDV is designed and manufactured as an advanced high speed pleasure craft for 4 to 6 SF divers. The main design and construction provides the following modes of operation: Surface mode at high speed. Semi-submerged mode at low speed. Submerged mode at low speed. Parked on the sea floor. The power propulsion system is based on a water-cooled Italian MTU 270kW (3650hp) diesel engine with a water jet Rolls-Royse propulsion system for surface and semi-submerged modes. Maximum speed on surface 35 knots. Semi-submerged 5 knots, and submerged 5 knots. Range on surface or semi-submerged 150 Nm. Range submerged 8 Nm. Operating depth with divers 40 m. Dimensions: Length 8.0m, Beam 2.0m.
NEREE SUBMARINE. The Nérée 201 was the first submersible ever built by Comex. Crew two. Weight - 3 tons. Operational Depth: 200 msw. length 250 cm, width 170 cm, height 160 cm. The sub is not in working condition, and would make a great project for a private enthusiast.
SY3 SUBMARINE FOR SALE. A brand new, small, luxury three man submarine, with a depth rating of 300m (1000ft). Available for sale. Ideal for Super Yacht owners. Endurance 12 hours. Speed 3 knots. Weight 3,800 kg. Width 244 cm. Length 320 cm. Height 174 cm. Battery capacity 21 kWh, Lithium-ion battery technology. Propulsion 2 x 5.5 kW + 2 x 6.4 kW. Auto-depth . Auto-heading.
MORZH. A one-atmosphere submersible designed for all commercial activities, scientific research, underwater filming, search and salvage. Crew: two or three. Operational Depth: 85m. Weight: 2.8 tons. Length 4,45 m. Width 1,95 m. Height 2,25 m. Reserve of energy: 5 hours. Life support: 72 hour. Speed: 2,5 knots. Communications: VHF radio and underwater telephone. 2 x compasses, depth sensor, echo-sounder, pinger, flash-strobe. External equipment includes manipulator (6 function), Box hydraulic for samples (specimens), Scissors (hydraulic), and 4 x external lights. Support equipment includes a lifting-frame with beam, and three phase electric winch (5ton SWL), maintenance/storage workshop. 120 cans with regeneration plates (one can - 64 human/hour life support), full technical documentation.
LUXURY LEISURE SUBMARINE. The ultimate luxury submarine, designed for the underwater luxury leisure market. Operating Depth: 300ft (100m). Weight: 35 tons. Crew: Two pilots and eight to ten passengers depending on interior configuration requested. Air conditioning. Large viewports on all sides, leather interior seating, cocktail bar, galley, all around sound system, DVD system and external cameras, and acoustic modem for email and Internet facilities. External lights, communications, video and sonar.
ACRYLIC ECO –SUB.The Silvercrest ECO-SUB is a 24-passenger carrying submersible designed to carry occupants to a depth of 100m. Its acrylic viewport configuration offers all passengers a superb panoramic view of the underwater world. While a large access hatch, and the wide internal circulation space, makes this an ideal submersible for disabled passengers. This submersible has been designed to minimise the risks to the environment by the careful choice of its components and configuration, allowing its use in marine park areas where the underwater ecology is sensitive to disturbance. This is a purpose built acrylic tourist submarine, designed for passenger comfort and safety. The submarine provides a panoramic view of the underwater world for all passengers, through large diameter acrylic viewports. The submarine operates to a maximum depth of 300 feet (100m) with twenty-four (24) passengers and two crewmembers. External lighting, VHF surface communications, and through-water communications, are fitted as standard.
GEM-SUB. A state of the art two-man submersible with a very high-tech image and specification. Operational depth: 150ft (50m). Weight: 3.6tons in air. Carbon steel hull, lead acid batteries, computerized touch-screen system activation, and joystick controls. Full range of life support and safety equipment. Domed acrylic viewports for both crewmembers. The ultimate submarine for yacht based recreation, or underwater leisure activities. Immediate delivery.
U-Boat Submarine (Large). These U-boats are ex military diesel-electric submarines, 300 feet (90m) long. Designed for continental shelf operations, with a range of two thousand miles. These submarines are not in working order, and may have been partially stripped of some internal parts. Ideal for conversion to use as maritime museums, cocktail bars or restaurants in static locations. Crew: 75. Displacement: 2,475 tons.
TRITON SUBMARINE. The Triton is the first submersible to be designed specifically for operations onboard large yachts. The vehicle seats two persons and will dive to 1000ft (305 meters). With an air conditioned one-atmosphere interior guests can remain at depth for many hours in total comfort. An acrylic hull offers panoramic viewing, while the catamaran hull configuration provides excellent surface stability and freeboard. Length 3.2m (L), 2.65m (W), 1.85m (H). Weight 3 tons. Fully equipped with air conditioning, communications, acoustic modem, Ethernet, subsea navigation system, underwater lights, sonar, and colour cameras. ABS +A1 manned submersible classification. Delivery is 12 months from order.
WRANGLER ADS. A one-man one-atmosphere tethered submersible, built in Canada by ISE. This unit is lightweight and ideal for salvage, scientific research, or general underwater tasks. This unit requires a minor refit prior to commencing dive operations. Operating Depth: 1200ft (400m). Crew: one. Weight: 1500kg. Two large acrylic viewports, manipulator arm, external lights and communications with the surface.
RS500 RESEARCH SUBMERSIBLE. A new build, small lightweight submersible designed for scientific research, underwater filming and subsea survey missions. This submersible operates with a pilot and two passengers, and has an intended operational depth of 450m. Length 5.0m, Beam 2.2m, Height 2.0m, Weight 5 Tons. Delivery 12 to 14 months from order.
TAURUS. A multi purpose submersible, designed for one-atmosphere operations, diver lockout, dry transfer, and submarine rescue (DSRV). This submersible is in excellent condition and dive ready. Suitable for underwater tourism, scientific research, search and salvage, and a range of military tasks. Crew: six (normal), six (diver lockout operations). Operational Depth: 1200ft (400m). Weight: 22 tons. One large front viewport, one large aft viewport, four tower viewports, one lower viewport. Fitted with external lighting, sonar system, acoustic tracking, communications, manipulator arm, and hydraulic cable cutter.
SKODAC TWO MAN SUB.Small two-man submarine. Length 3.4m. Weight 2550kg. Operating depth 120m. propulsion 2 x 5hp electric motors. Plus one bow and one vertical thruster. This unit has been in storage for a number of years, and is immediately available for sale.
Full Size Wooden Submarine Model for Sale.This full size submarine was built by VSEL in Barrow in Furness (England) as a wooden mock-up model for a military exhibition. Weight of Submarine 23 tonnes. Length of Submarine 123ft total length. You can easily walk through it (and would comfortably get ten people walking around inside). It has seven beds so we are assuming it was a mock-up version of a military seven-man submarine. This model cost VSEL GBP 400, 000 to make. A museum would now be the perfect place for it to be exhibited. Location England (Shipping by land or sea can easily be arranged). This is a very unique submarine. Offers invited.
All submarines and Rovs are sold " as is where is " unless agreed otherwise.
These submarines and Rovs are secondhand, and generally will be dive ready after a routine maintenance or refit programme. The prices shown offer the purchaser a substantial saving over the cost of a new build.
Silvercrest Submarines can arrange Submarine Maintenance, and Pilot Training courses for purchasers. Submarine Refit and Certification programmes can also be provided. Further information available on request.
Contact us today, to discuss your submarine and Rov requirements. We are happy to offer a wide range of ideas and suggestions that will assist your underwater project.
SILVERCREST SUBMARINES Tel: England (+44) 1285.760620. E-mail: Sales@SilvercrestSubmarines.co.uk
ROV’S FOR CHARTER. Please contact us with your requirements.
ROV’S FOR IMMEDIATE SALE. Manipulator Arm for sale. Schilling robotic arm in good condition. Alston Schilling, Type Conan 7 P. Complete with the Electronics. Immediately available. New build Mojave ROV in standard configuration. Immediately available.
Pollux(111) ROVs for sale. Two complete systems, one is 300m rated, the other 600m rated. Both systems are in new condition. The deep unit is upgraded with Tritech sonar, low light & HD camera & grabber manip. 3 x tethers (150, 300, 600 Meters). Spares package, 2 x control consoles.. Can be sold separately.
PHANTOM HD2. This is an older ROV with four thrusters, and a Simrad Osprey colour zoom camera fitted, plus two lights. Complete with a HydroLec robotic/mechanical arm, two umbilical cables (plus winch), a deck unit and monitor in a flight case, deck control unit and all connecting cables. Various spares and three manuals.
Containerised Super Seeker ROV for sale. Super Seaker ROV System with offshore container, launch & recovery system, slip ring winch and sonar. The System Comprises: Super Seaker vehicle. 200m umbilical. Electric slip ring launch & recovery winch. 4 x Hi-thrust thrusters . Depth & Heading over layed on video. Seacam® colour camera . Seacam® monochrome camera. Manipulator arm. 2 x 250w Seabeam lights. Unzoned DNV Container fitted with: Control console. Video suite. Launch/recovery davit arm. Power distribution and controls.
Mojave ROV for sale. Mojave ROV for sale. Dive ready. 300m depth rated. Tritech colour zoom camera, extensive spare parts kit, 340m tether, manual EX winch, 2 x extra lights, client junction box, Technical Operation and Maintenance Manuals.
H300 MKII - Inspection ROV. Depth rated to 300 m. Sufficient power and thrust to withstand sea currents up to at least 3 knots. High performance viewing system, with both a colour/zoom TV camera (mounted on a full Pan/Tilt unit) and a B/W very low light TV camera. Altimeter (with auto altitude function) . Positioning system. High resolution digital still camera. Manipulator arm. Single and ergonomic hand controller for both the ROV and a 5 functions manipulator arm. Control unit incorporating the power supply unit, and offering a PC screen with either video only, or the combination of video, sonar display and digital still control. Dimensions (mm) : 900 L x 470 H x 600 W. Weight in air : 70 kg excluding optional equipment. Material : polypropylene frame, stainless steel fittings.
Perry Triton WROV XLR 125hp for sale. Perry Triton medium Workclass ROV XLR 125hp available for immediate sale, dive ready. Complete package (as per manufacturers specification) with ROV, Umbilical, LARS, TMS, Control van, Work van, spare parts package, and all documentation.
5,000m ROV system for sale. We currently have an ISE ROV system for sale (5,000m depth rated). The system includes the ROV, control van, spares, 1 x 5000m buoyancy block, 1 x 2000m buoyancy block, 1 small winch with 500m soft umbilical. The system is in shallow dive ready condition, it was last used for Drill support in 2012, and at the present time has the 2000m rate buoyancy block, and is using a small winch with 500m of soft umbilical. The ROV is presently in storage. To convert this ROV back to the original 5000m operating depth, the 5000m buoyancy will need to be fitted, and a suitable LARS, winch and umbilical will be required.
Apache ROV system for sale. Apache ROV No. 07, rated to 1000m (3000ft). Ready for immediate worldwide delivery. Year of manufacture 2000. Estimated operating hours 1200. Apache ROV with umbilical, full camera suite and Tritech single function manipulator. Control Van and complete control system. Complete Launch and Recovery system (integrated into a single container with the control van; winch provided in LARS is pneumatically driven).
3 x Rig Worker ROVs (R3000 series) for sale. These three ROVs are being sold as one package. The complete package includes a) ROV, Garage, winch and Control van. b) ROV, PDU, Transformers and topside equipment. C) ROV frame and buoyancy and all parts to rebuild the vehicle. d) Assorted spare parts. All of these ROVs will require a maintenance / rebuild programme. Perhaps making two working systems from the three units available. Rov size 2.1m(l), 1.4m(w), 1.5m(h). Weight 1650kg. Depth rating 1000m. Hydraulic thrusters, 37kw HPU, Auto depth and heading, Hydraulic manipulators.
Falcon ROV for sale. This Falcon ROV is in good condition and dive ready. Vehicle unit with five SI-MCT01 thrusters ( four vectored horizontals and one vertical). SEAEYE colour video camera, tilt platform and tilt feedback system. Automatic heading & depth system. Navigational flux-gate compass and integral solid state rate sensor. Two dimmable 75 watt lighting units. Standard Surface Control Unit c/w a 15” colour TFT monitor (dual input). Surface power supply unit. Hand Control Unit. Video Overlay system. 8.5kg of lead ballast. Additional Buoyancy Module providing 16kg of additional payload. Umbilical Cable (16mm OD) 450 meters (Extra twisted pair provided) : Proprietary lightweight cable, Thermoplastic Elstomer high abrasion resistance. Vectran strain member- 530 kg breaking strain. 4 screened twisted pairs, 4 x Power Conductors, 1 x Discrete Conductor for CP Reference. Thermoplastic Elstomer inner and outer sleeving with embedded Vectran strength member .Hand Operated Umbilical Winch - 450m capacity 11, 14 or 16mm Cable .10m Deck Cable from Winch to Surface Unit (umbilical cable). Upgrade to two standard LED lights. Additional (third) LED Lamp Unit. Single Function Manipulator Kit. Cathodic Potential (CP) Probe Kit. SI AUX IP01 - Auxiliary Input Node RS485 (CP Interface). CP PROBE - contact probe (includes lead) FI-KIT02 - CP integration kit including brackets and factory installation. Contact Probe Tip (replaceable item) Cygnus Ultrasonic Thickness Gauge. Cygnus ROV UT Gauge (1000m rated). Imagenex 881A Multi Frequency Imaging Sonar. FI-KIT09 881ª Sonar Integration Kit Falcon Field Maintenance Kit.
Hyball Standard ROV system for sale. Dive ready and in excellent condition. Only 50 hours of use to date. New on-board JVC Camera, and a second Low light B/W Camera. Both fitted in 2003 by Hydrovision. 150m of Standard cable, and 300m of neutrally buoyant cable with it. Two spare thruster units. Manipulator. Also a Sonar connector (which would allow for a Tritech Seaprince Sonar with an old style Surface control unit (SCU3) to be purchased and fitted. Training course available.
Phantom ROV for sale. Deep Ocean XTL with a Phantom control unit. Equipped with two lights, depth sensor, compass, zoom camera with TPZ control. Includes two 500' tethers, and a booster box for the lights and a small spares kit. It is 110VAC, and was used for about a year and then stored. Good condition.
Mariner ROV (Ippodamus) for sale. Survey - Observation – Inspection Class ROV with a depth rating 950m. Manufactured 2009. The system has recently been fully serviced and inspected by the manufacturer, and is in very good condition. Less than 100 hours use (one project). In addition to the basic ROV/ Surface Control Unit, components, and 350m umbilical cable, this ROV has the following extra equipment fitted: Double Screen Display (monitoring of all ROV functions). Super SeaKing Scanning Sonar Dual Frequency (Tritech). Tritech SeaHub - Sensor Interface for PC or Laptop Computer. PA-500 Altimeter (Tritech). Manipulator dual control / 3 fingers (control from surface console). Auto heading and auto depth. High-resolution colour camera with green lazer. Video overlay system. Panasonic DVD Recorder/ Edit Capability. Complete and comprehensive spares package. Enclosed Aluminium Trailer/workshop (This is a complete operational package that can be mobilized in hours). Will sell with or without the trailer. Drum for the cable is Available (service required).
AC-ROV (Model SP-50). The smallest inspection class Rov in the market place (190mm fly through). The AC-ROV is more powerful, more robust and a more cost effective solution than all other Rovs in its class. This Rov can hover, circle, rotate on its axis, and move in any direction the target requires. Operating depth of 75-100m. A total system carry-case weight of under 15kg. The unit has been designed for inspection in hazardous and confined areas. Rov Size: 203mm x 152mm x 146mm. Weight: 3kg. Camera: Colour CCD. Thrusters: 6 thrusters (4 x horizontal vectored, 2 x vertical). Lights: 4 cluster leds (variable intensity). System Power: 300 watt (0.4hp). Payload: 300g. Inputs: 90/260vac (47/63Hz) or 124/370vdc. System includes: AC-ROV, Control Unit, Tether Reel with 80m tether, Monitor, Spacemouse control, Depth Sensor, Video Grabber cable - plugs into Laptop/PC for recording, Storm Case, Instruction Manual. This ROV System is a new build, and delivered dive ready.
ROV Builder RB150. A small eyeball ROV in brand new condition, direct from the factory and never used. Two function manipulator, colour camera, 3 x powerful LED lights, and 150m cable.
Other ROVs also available. Please contact us with your requirement.
SILVERCREST SUBMARINES Tel: England (+44) 1285.760620. E-mail: Sales@SilvercrestSubmarines.co.uk
Other ROV secondhand equipment available. Please contact us with your requirements. Submersible Electric Motors. Submersible motors, Subsea motors, ROV motors, ROV HPUs (for sale). Silvercrest/SME specialize in the bespoke manufacturing of submersible motors, HPU's, and pumps for use on Rovs, subsea trenchers, subsea ploughs, dredgers and water lift pump systems, for use in the offshore Oil and Gas and Telecommunications industries. We offer a range of submersible motors (5hp to 1500hp) with a choice of voltages (ranging from 380vac to 6600vac) for use subsea to depths of 6000msw. All of these motors are available in either SS316, Duplex, Super Duplex, or Hard Anodized Aluminium finish. We can also design and build motors to suit your individual and special project requirements. In addition we refurbish, rewire, and service a wide range of submersible motors. Our product is excellent, our prices very competitive, and our delivery schedule the best in the industry.We recently delivered ten 260kW, 3000VAC, double ended, 2-pole, stainless steel bodied motors to a subsea operator, for use on their fleet of sub-sea trenchers. This was a bespoke order that was completed in just six weeks from receipt of order. In addition we also recently manufactured five (5) 400kw motors for SMD. We supply submersible motors, HPUs, and motor-pump sets to SMD, CTC Marine, Fugro, Impresub, Saab SeaEye, LDtravocean, and other subsea companies. We would be very pleased to discuss the details of your motor / pump requirements in order to produce a detailed quotation for you. Contact: Silvercrest / SME Email: sales@SilvercrestSubmarines.com www.submersible-motors.com
SUBMERSIBLE MOTOR-PUMP SET (ROV HPU) for IMMEDIATE SALE. New 65Hp submersible Rov HPU for sale. The motor-pump set is brand new, direct from our factory and has been constructed specifically for this purpose.
SME ROV12-2, 48kW 65HP, 2-pole, 3000/3/50, Aluminium Construction ROV Motor fitted with Rexroth A10VO28DFR1/31R-PSC62N00 Hydraulic Pump. Burton Connector for Power Leads. Fitted with Temperature Sensing and Water Detectors.
Mil Spec hard-anodised T6 hardened 6061 grade Aluminium construction, with all 316 hardware. Rotor dynamically balanced. Oil filled externally compensated. Fully factory performance tested on Dynamometer at rated voltage and frequency. Subsea connectors for power and instrumentation. Designed for maximum electrical efficiencies to reduce full load currents. Motor designed for low operating temperatures to extend reliable lifespan. Specialised winding insulation system to ensure long operating life, even under the most arduous of duties. On Deck operation generally allowable. Location. UK
SILVERCREST/ SME Tel: (+44) 1285 760620 Email: sales@SilvercrestSubmarines.com
ROVS FOR CHARTER,
ROVs are an excellent tool for underwater inspection, designed for accessing awkward and inaccessible areas to clearly reveal damage or defects. Our small eyeball/inspection ROVs have vertical and horizontal thrusters, are neutrally buoyant, and have excellent manoeuvrability. These small ROVs are tethered, and can operate at a depth of 100 metres (or deeper), providing excellent colour video that can be recorded and kept for future reference. Our small eyeballs ROVs are suitable for all underwater inspections in fresh water or seawater. They offer numerous applications, for example: damage inspection for insurance companies, environmental, insurance, pre-disturbance archaeological surveys and assessments, wreck survey, search, salvage and recovery, water tank inspections, pipeline inspection, reservoir inspection, harbour survey, ship hull inspection clearance and recovery, dock gate inspections, piling inspection, offshore structures survey, bridge inspection and many aspects of police search, location, underwater security and recoveries, diver support and underwater film production. Communication between the ROV (underwater) and the surface operator is through the umbilical that provides a real time flow of information including video footage.
SILVERCREST SUBMARINES. Tel: England (+44) 1285. 760620. E-mail: Sales@SilvercrestSubmarines.co.uk
TITAN COMMANDO ROV for SALE and Charter.
This ROV is a mobile underwater camera system, controlled from the surface and capable of staying submerged indefinitely. The ROV is suited to a variety of subsea applications including pipeline inspections, river and ocean searches, dam and tunnel surveys, oil and gas platform work, fish farming, homeland security operations, and underwater recreation. The ROV will dramatically reduce underwater search time, as well as the risk and high cost often associated with diving operations. With suitable sensors fitted, the ROV is capable of locating weapons, unexploded ordnance, pipelines, buried treasure, and other metal objects that may be underwater. The Titan Commando ROV is an inspection ROV made from an aluminium body with a stainless steel protection frame. 600ft Kevlar umbilical cable. Control box. Three thrusters. Tungsten Halogen lights. Super wide-angle camera. Camera tilt function up/down. Camera lock. Sonar system (option). The unit is packed in three carry cases, (ROV, umbilical, and equipment). The Titan ROV is ideal for underwater surveys and inspections, search and rescue, security and recreation, homeland security, harbour and ship security operations. Easily deployed from a small workboat, or a surface platform, by a one or two-man crew. These ROVs have been used around the world from Scandinavia to the Caribbean Sea. Dive ready and tested. ROV shipping boxes (inches) 26 x 24 x 20 (134 lbs). Rov and controller 27 x 21 x 11 (57 lbs). Spare equipment case. 24 x 15 x 24 (138 lbs). Umbilical and hand winch.
Cougar ROV for Charter. Cougar Compact ROV System – 300m depth rated.
Our Cougar ROV (remotely operated vehicle) is configured to be a compact free-swimming offshore ROV system. It comes complete with A60 Zone 2 control container. and A60 Zone 2 gravity based crane LARS (launch & recovery system). The ROV is ideal for close and general visual inspections of client subsea assets and construction support. Maximum operating depth: 300 metres 3 simultaneous video channels, option to fit 4 cameras Kongsberg Colour Zoom / Focus Camera Kongsberg Lowlight Black and white camera 80 Kg payload 4 Vectored and two vertical Seaeye SM7M thrusters with velocity feedback Tritech Super Seaprince DST Sonar 1200 watts of variable intensity LED lighting positioned on the camera tilt platform and chassis Integral video overlay Zone 2 Control Container Zone 2 Gravity based crane mounted Launch and Recovery System (LARS) Length 1300 mm, Height 785 mm. 900 mm (with tooling skid), Width 915 mm. Thrust Fwd 170 kg, Thrust Lateral 120 kg, Thrust Vertical 110 kg. Weight 300 kg without tooling skid Payload 80 kg
SeaEye Falcon ROV for charter.
Falcon Pus ROV System – 1000m depth rated.
The Falcon Plus is configured to be a free swimming offshore ROV (remotely operated vehicle). The system comes complete with control container and crane mounted LARS (launch & recovery system). The Falcon Plus incorporates subsea and surface fibre optic multiplexers and an umbilical for the transmission of both video and data over fibre optics between the surface and the vehicle. Specifications of the Falcon DR ROV: Video Overlay includes as standard Compass Heading Depth in metres or feet Camera tilt platform position Auto function status CP reading (optional) Odometer Count (optional) Date and Time Facility to export data to survey Length 1000 mm, Height 780 mm, Width 600 mm. Thrust Fwd 96 kg, Thrust Lateral 56 kg, Thrust Vertical 12. Weight 130kg Payload 15 kg ROV comes complete with 1 x Super Seaprince sonar 1 x Colour camera 1 x Lowlight monochrome camera 3 x 75 Lamps (Additional lamp on request) 8 x MCT 1 Horizontal Thrusters 1 x MCT 1 Vertical Thruster 1 x Remote spares package Safe area control container Safe area electric winch with crane on LARS skid
ROV SUBMERSIBLE SUBSEA MOTORS, and HPUs. Silvercrest/SME specialize in the bespoke manufacturing of submersible motors, and pumps for use on Rovs, subsea trenchers, subsea ploughs, dredgers and water lift pump systems, for use in the offshore Oil and Gas and Telecommunications industries. We offer a range of high quality submersible motors (5hp to 1500hp, 380 to 6000volts, 3000m depth rated) for use in the more popular classes of subsea ploughs and Rovs. All of these motors are available in either SS316 or Hard Anodized Aluminium finish. We will design and build motors to suit your individual and special project requirements. In addition we refurbish and service a wide range of submersible motors. Our product is excellent, our prices very competitive, and our delivery schedule the best in the industry. We recently delivered ten 260kW, 3000VAC, double ended, 2-pole, stainless steel bodied motors to CTC Marine Projects Ltd, for use on their fleet of sub-sea trenchers. This was a bespoke order that was completed in just six weeks from receipt of order. Other motors recently delivered have included 300Kw submersible motors to SMD, as well as 75Hp and 100hp motors to various Rov operators. We would be very happy to discuss the details of your motor / pump requirements in order to produce a detailed quotation for you. Some recent examples: Silvercrest/SME have supplied six 400kw ROV20-4 motors, 4pole/3300vac/3 phase/60hz, stainless steel construction. Single ended for fitment with Sauer hydraulic pumps Series-90-L250. Rated for 3000m depth operations. Also three (3) three ROV204 submersible motors (300kw/4 pole/3300vac/3 phase/60hz) with stainless steel construction, and double ended for fitment with Sauer hydraulic pumps to SMD-Hydrovision. Together with 7.5kw motors for Rov cursor application. To LD-travocean, Submersible motors to be mounted with water-jetting pumps. SME ROV14-2, 200HP, 150kW, 2- pole, 3000/3/60 motors with Anodised Aluminium Construction. Other subsea motors supplied in SS316 construction. To Saab SeaEye for their Jaguar ROV. SME ROV12-2 48kW 65HP 2-pole 3000/3/50 Aluminium Construction ROV motors fitted with Rexroth Hydraulic Pumps. Ten 260Kw submersible motors with SS316 construction to CTC Marine Projects based in Teeside, England. The motors will be used by CTC on their subsea plough and trenching vehicles worldwide.
ROV 260kW Silvercrest/SME Pump Motor under construction. The 260kW/ 3000V / 60Hz / 2 pole pump motors (designed specifically for use in the horizontal axis) were fitted with shafts at both ends, in order to mate with three tandem mounted hydraulic pumps on one end and a Hayward Tyler M6 single stage water pump-set on the opposite end. In this 260kW model, rather than using the pivot shoe arrangement, typical of vertically oriented pump-sets, heavy duty tapered roller bearings were fitted to the rotor to manage the water pump induced end-loads. Thus giving a calculated bearing life in excess of 11,000 hours, even when used in the horizontal axis. Depth rating on each motor is 10,000 meters, with oil filled compensation. Motor housings are 316 stainless steel, with Mylar coated windings (the ultimate in winding coating technology) being used in each motor at the request of CTC, giving an insulation rating of >16kV at a temperature of 140 degrees C. Silvercrest/SME will bespoke manufacture virtually any shape and size of submersible motor required for subsea operations.
We can offer subsea motors with a wide range of speeds and voltages (including 3000v, 6000v and 10,000v) We can design and build motors to suit your individual and special project requirements. We refurbish and service a wide range of submersible motors. Our product is excellent, our prices very competitive, and our delivery schedule the best in the industry.
SME MOTORS FITTED TO A SUBSEA TRENCHER.
A new Saab-SeaEye Jaguar ROV, fitted with our SME ROV12-2, 48kW 65HP, 2-pole, 3000/3/50, aluminium construction ROV submersible motor, and Rexroth hydraulic pump. Fitted with temperature sensing and water detectors. Epoxy coated for protection. We manufacture and rebuild very large submersible motors for a range of other offshore and subsea companies. These include:Global Marine, CTC, Sonsub, Star Energy, Sulzer Wood, Sulzer, Fugro, Apache, BHP Billiton, Petronas, SMD, Exxon Mobile, Chevron, Perry Slingsby, Subsea7, Bayu Purnama, ISE Ltd, Saudi Aramco, Woodside, PXP. SME has also manufactured a total of seven (7) 6600V motors todate, for three different offshore contracts. Petronas Dulang and Angsi Platforms. Star Energy KG Platform.
Silvercrest / SME design and build specialized subsea motors, and support packages for use on all types of Rovs and underwater vehicles in the offshore and subsea industry. These submersible motors are usually made to order and vary from 1kW to 1500kW, 400 to 4160 Volts. 50 or 60 Hz, 2-Pole to 8-Pole. There are two common methods of construction available: - Stainless steel construction, or Marine Grade aluminium that is Black anodised to resist corrosion. These motors are usually oil filled and pressure compensated. Common operating voltages are between 300 volts and 3300 volts - even for small 5kW motors. 6,000vac and 11,000vac motors also available by special request. Silvercrest/SME will bespoke manufacture virtually any shape and size of submersible motor required for subsea operation Certain subsea motors can operate down to depths of 10,000 meters.
SME manufactures new Submersible, Subsea, and Rov motors.
We manufacture our own laminations, designed specifically to meet the individual requirements of each customer. We do not buy off the shelf standard rotor sets and fit them in a housing, as some other manufacturers will often do. As a result our motors are more efficient and generally ightly smaller, in both diameter and length, than our nearest competitors for any given power rating. Silvercrest also offer a range of ‘standard’ motors for use in well-established underwater installations, such as the more popular classes of Rov and subsea ploughs.
Rov and Subsea Plough and Trencher Motors. Silvercrest offer an established range of Rov motors ranging from 5HP to 500HP. All of these motors are available in either SS316 or Hard Anodized Aluminium finish. We will also design and build submersible motors to suit your individual requirements and subsea project. Our motors are in use with most of the major operators worldwide such as Saipem, SMD Hydrovision, Sonsub, CTC Marine Projects, Impresub, Fugro, Thales, MTQ, LD Travocean and Canyon Offshore.
Silvercrest will bespoke manufacture virtually any shape and size of submersible motor and submersible pump required for subsea operations. We will be very happy to discuss the details of your subsea motor / pump requirements in order to produce a detailed technical quote for you.
Email: sales@SilvercrestSubmarines.com Tel: (+44) 1285.760620.
SUBMERSIBLE SUBSEA ROV MOTOR FOR IMMEDIATE SALE. ROV124-100HP Submersible Motor (Curvetech drop-in replacement). Immediate delivery. This is a new unit direct from our factory, 100Hp, 3000v, 60hz, with black anodised aluminium housing. Depth rating 3000m. 100 HP ROV Submersible Motor - Immediately Available. Silvercrest-SME has placed a 100Hp submersible Rov motor (as illustrated below) on immediate standby, for emergency availability to all Rov operators. The motor has the following specification and is a direct drop in replacement for the Curvetech 100HP unit. The motor is presently set up to receive a Rexroth A10VSO140 pump, but can be modified to accept other pump models if required. The motor is brand new, direct from our factory and has been constructed specifically for this purpose. Location England. Can be shipped immediately by land, sea or airfreight. Specification.ROV124-100HP, 4-pole, 3000v, 60Hz. Mil Spec hard-anodised T6 hardened 6061 grade Aluminium construction, with all 316 hardware. Rotor dynamically balanced. Oil filled externally compensated. Fully performance tested on Dynamometer at rated voltage and frequency. Subsea connectors for power and instrumentation. Designed for maximum electrical efficiencies to reduce full load currents. Motor designed for low operating temperatures to extend reliable lifespan. Specialised winding insulation system to ensure long operating life even under the most arduous of duties. On Deck operation generally allowable. Power 100 HP. Volts 3000V. Frequency 60 Hz. Poles 4. RPM 1770 RPM. Shaft Woodruff keyed (see attached drawing for detail). Construction Hard Anodized Aluminium 6061-T6. Compensation Oil filled - external-not supplied. Power Connector Burton 5757-1236-002. Sensor Connector SubConn BH-4-M.
Should you have any other motor / pump requirements, please contact us at any time.
Tel (+44) 1285 760620. Email: sales@SilvercrestSubmarines.com
Fiber Optic Products, for use on underwater vehicles, ROVs, and various military applications. See our information sheets at the bottom of our Company News Page. (Click on the menu button).
TITAN COMMANDO EYEBALL/INSPECTION ROV FOR CHARTER. Small inspection ROV complete with 400ft umbilical cable.The unit is packed in three carry cases, (ROV, umbilical, and equipment). Complete with thrusters, lights and cameras. Dive ready and tested. Ideal ROV for inshore and Inland diving inspection tasks. Dam inspection and surveys. Harbour and ship security and inspection tasks. Police underwater search operations. This ROV is a mobile underwater camera system, controlled from the surface and capable of staying submerged indefinitely. The ROV is suited to a variety of subsea applications including pipeline inspections, river and ocean searches, dam and tunnel surveys, oil and gas platform work, fish farming, homeland security operations, and underwater recreation. The ROV will dramatically reduce underwater search time, as well as the risk and high cost often associated with diving operations. With suitable sensors fitted, the ROV is capable of locating weapons, unexploded ordnance, pipelines, buried treasure, and other metal objects that may be underwater. The Titan Commando ROV is an inspection ROV made from an aluminium body with a stainless steel protection frame. 600ft Kevlar umbilical cable. Control box. Three thrusters. Tungsten Halogen lights. Super wide-angle camera. Camera tilt function up/down. Camera lock. Sonar system (option). The Titan ROV is ideal for underwater surveys and inspections, search and rescue, security and recreation, homeland security, harbour and ship security operations. Easily deployed from a small workboat, or a surface platform, by a one or two-man crew. These ROVs have been used around the world from Scandinavia to the Caribbean Sea.
SEAEYE FALCON ROV FOR CHARTER. Falcon DR ROV available for charter. Complete with 1700m umbilical, sonar, fiber optic video, colour zoom camera, B/W camera, Link Quest tracking, and Video overlay. Contact us for full details, specification, options, and availability.
ROV'S FOR IMMEDIATE SALE and possible charter.
Please contact us to discuss your requirements. We can offer other Rovs for sale that are not listed below. Rovs for Charter and for Hire (long and short term). Please contact us for availability, as the listing below is always changing.
MARINER ROV (Ippodamus) for sale. Survey - Observation – Inspection Class ROV with a depth rating 950m. Manufactured 2009. The system has recently been fully serviced and inspected by the manufacturer, and is in very good condition. Less than 100 hours use (one project). In addition to the basic ROV/ Surface Control Unit, components, and 350m umbilical cable, this ROV has the following extra equipment fitted: Double Screen Display (monitoring of all ROV functions). Super SeaKing Scanning Sonar Dual Frequency (Tritech). Tritech SeaHub - Sensor Interface for PC or Laptop Computer. PA-500 Altimeter (Tritech). Manipulator dual control / 3 fingers (control from surface console). Auto heading and auto depth. High-resolution colour camera with green lazer. Video overlay system. Panasonic DVD Recorder/ Edit Capability. Complete and comprehensive spares package. Enclosed Aluminium Trailer/workshop (This is a complete operational package that can be mobilized in hours). Will sell with or without the trailer. Drum for the cable is Available (service required).
Vector ROV (Deep Ocean Engineering). 25 hours of use only. Comes with custom-built heavy-duty aluminium travel cases for all components (fitted with forklift lugs) making for easy transportation. High performance, portable, reliable and easy to operate. 5 x high performance brushless thrusters, four vectored and one vertical. Rate gyro stabilized, solid-state magnetic compass unit: resolution +/- 0.1degree, accuracy +/- 0.5degree, update rate 50 mS. Electronic depth sensor: accuracy 0.25% of fsd. Autopilot for auto-heading, auto depth and optional auto-altitude. Lighting: 2 x 250 watt Quartz-halogen lamp units. The control is /Low/Medium/Full. Power requirements: Input 230VAC, 50/60 Hz, 10 kVA, single or 3-phase. Camera unit: DOE 18:1 colour zoom camera unit. Camera tilt platform. Phantom DHD 2+2 for Sale. Dependable ROV for offshore inspection and light work tasks. Suitable for operations in strong currents to depths of 600 meters (2000 Feet). Hull # 539 - Date of Manufacture 2008. Used less than 200 hours. DOE Manipulator / Cutter. High Resolution Sony Colour Camera. Sony DVD Recorder / Edit Capability. 3 x Deep Sea Power & Light 250-Watt Lights. 2 x 169 meters (600 ft.) Tethers with wet matable connectors. Umbilicals attachable together for a total of 338 meters (1100 ft.). Complete and comprehensive spares package. Original shipping crates available. Lots of tools, accessories and extras. 24-Foot Enclosed Trailer serves as a workshop, dry storage and for shipping. This is a complete turnkey ROV operational package that can be mobilized in hours. SV’S FOR IMMEDIATE SALE.
Cougar XT System. Complete with TMS, LARS and control cabin. Call us.
Comanche ROV for sale. Depth rating 2000m.Comanche incorporates a fully electric, seven thruster propulsion system, configured to provide high thrust and lifting capability. It uses a 3000 Volt, 400 Hz power transmission system from surface to ROV resulting in a small tether, mainlift cable and launch/recovery system. This transmission system makes it particularly suited for long tether excursions and deep live-boating operations. Complete with a 20 ft control cabin, LARS, Tether Management System, and Schilling manipulators.
TRITON Work-class ROV for sale. Work class ROV with 3000m depth rating (125hp XLR) complete with Control and Workshop Vans, TMS, Umbilical and LARS. Standard specification. .
AGONUS - 230 HP Work class ROV. The ROV Agonus is a heavy workclass ROV (230 hp) system, with an operating depth up to 1500 msw. The vehicle is equipped with high-specified equipment and is designed to be very flexible in the range of optional survey equipment and tooling packages, which can be fitted, either underneath or at a side of the vehicle. The vehicle system is designed to be adaptable for future work tasks, which may require additional transducers, hydraulic functions or increased payload. The TMS is designed to the same high level of specifications as the vehicle. The system consists of following units: ROV, TMS, Catcher, Umbilical winch with 200m umbilical attached, Control cabin 20ft, Workshop cabin 20ft.
SIRIO ROV for sale. The Remotely Operated underwater vehicle (ROV) SIRIO in standard configuration, is a small and easy to use multipurpose ROV. Designed for subsea inspection and observation tasks. A 2F manipulator can be fitted as an optional extra. System has only 300-350 hours working, and is in dive ready condition. The Sirio ROV is available for sale with a 160m umbilical cable, and manual stainless steel umbilical winch. Price: USD 44, 745.
Falcon ROV for sale. This ROV has been little used, and very well maintained. This Falcon System has been greatly improved over the unit originally supplied by Seaeye. Falcon ROV (non Fibre Falcon System) comes with: 250m loose standard Seaeye 11mm 3TWP cable. Another loose 175m 4TWP 13.2mm cable. This umbilical is an individually shielded 4TWP construction with power conductors inside. This in line connector length is connected via an adapter to the Surface control / Power Supply Unit. / this enables us to add various lengths if required or attach to the 500m drum. Improved slip-ring winch with 500m special 4TWP 13.2mm cable on a slip ring drum (possible to attach an electric drive motor). This allows the Falcon ROV to perform long tunnel penetrations. 5-function Manipulator. Survey pod installed on the Falcon providing power and comms (TWP) to a third party sensor. Tritech Seaking Sonar with AUX Port to hook up a USBL Transponder, Profilers, Side Scan, Parametric Sub Bottom Profiler. Camera tracking light, 50W Halogen. Umbilical / umbilical handling. Clock latch mechanism that can automatically release the Falcon when in water or being activated by a pull-line. Lots of spare parts. Survey JB containing power supplies and a number of connectors for third party sensors and lights. ROV has been upgraded with Data-Out Function License, New Modern navigation board. Pitch and roll display, Video board for 2 x Cameras and zoom and Focus Function plus one relay to switch function. All Thrusters recently serviced by Seaeye to the newest specification and extended reliability.
Synflex High Pressure hose for sale. This is new subsea Synflex high pressure hose, never used and still in manufacturers wrapping. Total length 290m. Type 3R80. 3/8 inch. 4000psi. Contact us for details.
ROV Syntactic foam Buoyancy Blocks for sale. Large number of Syntactic buoyancy blocks rated to 1000m (3000ft) for sale. Assorted sizes. Contact us for details.
CABLE INSTALLATION (ROV) SYSTEM. ST206. Vehicle can be Free Fly or tracked. Dive Depth 2500 meters. Horizontal Speed 2.6 knots forward (Tracks 2.25 knots). Complete with control system, cameras, sonar, configurable with USBL tracking system. Extensive tooling package. Electric Motors. Hydraulic Pumps. Control Center. Spares Van. Launch and Recovery System. Umbilical Winch. A-Frame. Hydraulic Power Unit. 3300meter lift umbilical with one identical spare. Contact us for details.
TITAN COMMANDO ROV. This a brand new inspection ROV complete with 400ft umbilical cable and control box. The unit is packed in three carry cases, (ROV, umbilical, and equipment). Complete with thrusters, lights and cameras. Dive ready and tested.
HIROV -WROV for SALE. This WROV is 125HP (90KW), and depth rated for 2000m, offering high performance, cost effective and reliable subsea operations. Fitted with 7-function Schilling Conan manipulator, 5-function Bennex rate manipulator, electro/hydraulic power pack, 6 x horizontal thrusters, 3 x vertical thrusters, pan and tilt, SIT camera, Tritech sonar. Complete with workshop and control containers, umbilical winch with 500m umbilical fitted, 4 ton A-frame. No TMS. All technical manuals. Spare parts package included. Dive ready. Immediate delivery.

Phantom DHD 2+2 for Sale. Remote Operated Vehicle with console, control box and ISO transformer. Two-function manipulator/cutter. 550ft wet-mate umbilicals (2 off). Spare ISO transformer. Yanmar 6kW diesel generator and Honda 5.5 kW generator. Comprehensive spares package. Lots of tools, accessories and extras. 20 Ft. Enclosed Aluminium Trailer / workshop (original shipping crates also available). This is a complete turn-key operational package that can be mobilized in a few hours.
Hyball Offshore ROV system for sale. Dive ready and in very good condition. Complete with vehicle, Surface control unit and surface monitor, high-resolution colour camera, and low light camera with focus. Various penetrator options for additional equipment and sonar head bracket (Sea Prince sonar available under a separate arrangement). Special 60-degree beam angle halogen lights for perfect illumination. 197m umbilical. Hydrovision technical manuals. Extensive spare parts kit included. Training course available.
LBV150 - ROV. Small, lightweight Rov with depth rating of 150m (500 ft). Max operating current 2 knots. Length 530 mm. Width 245 mm. Height 254mm. Weight in air 11kg. Protective shell and alloy bumper frame. 4 x Thrusters. Cameras have manual focus control via hand controller (90mm to infinity). Format PAL / NTSC. Camera Tilt 180 degrees. Camera Primary 570 line, view HAD colour 0.2 Lux. Camera Secondary 430 line B/W 0.03 Lux. Lights 50 Watt Quarts Halogen. Manipulator with 40kg lift capacity. Umbilical on reel 150m (500ft). Power supply 240vac/50hz. Integrated Control Console. 15-inch monitor behind a waterproof panel. On-Screen Information displayed: Thruster gain settings, light level, trim On/Off, heading, depth, turns counter, camera angle, water temperature, time, date, user text.
3 x RigWorker ROVs (R3000 series) for sale. These three ROVs are being sold as one package. The complete package includes a) ROV, Garage, winch and Control van. b) ROV, PDU, Transformers and topside equipment. C) ROV frame and buoyancy and all parts to rebuild the vehicle. d) Assorted spare parts. All of these ROVs will require a maintenance / rebuild programme. Perhaps making two working systems from the three units available. Rov size 2.1m(l), 1.4m(w), 1.5m(h). Weight 1650kg. Depth rating 1000m. Hydraulic thrusters, 37kw HPU, Auto depth and heading, Hydraulic manipulators.
Sea Otter ROV for Sale (with 500ft umbilical). This is a JW Fishers low-cost, high-performance ROV. These ROVs are ideally suited to a variety of applications including pipeline inspections, river and ocean searches, dam surveys, oil and gas platform work, fish farming, and homeland security operations. The SeaOtter is best suited to working in areas with low to medium currents. This ROV has front and rear facing colour cameras with pan and tilt. Illumination for the front camera is provided by two very bright 50-watt tungsten halogen bulbs. Lighting for the rear camera is provided by a ring of high intensity LEDs. The SeaOtter-2 has a 500-foot depth rated housing and comes with 250 feet of cable (upgraded to 500ft length on this system that is for sale). System controls are laid out in a high impact waterproof case with an ultra bright 10.4 inch flat screen monitor built into the lid. Command of the ROV's thrusters, cameras, and lights are managed with a PS2 controller. A video output jack allows an additional remote monitor to be used simultaneously with the internal flat screen monitor. An internal video amplifier adjusts picture quality to optimise the video for water clarity. Connect a VCR or DVD recorder and make a permanent record of the underwater scene. With the internal audio amplifier voice can also recorded with the video picture.
SeaSprite inspection class ROV. Ideal for underwater inspections, inshore security operations, and inspection in hazardous and confined areas. The SeaSprite is a compact, powerful, robust and cost effective inspection and observation class ROV with an operating depth of 300m. The system is designed to be transportable in hand carry transport cases. Small and light enough for one operator to launch and recover from the water. Size 300mm x 300mm x 350mm, weight 25kg in air. Colour camera minimum 570 TVL, 0.3lux. Rear camera mono CCD (NTSC) minimum 530 TVL, 0.1lux. 6 x thrusters (4 x horizontal vectored, 2 x vertical). Lights 4 x cluster LEDs (variable intensity in steps). Control 3-axis joystick + 1 axis joystick for depth. Auto Heading and Auto Depth functions. Sensors for Depth, Compass, Temperature, water ingress. 2 - function manipulator. System Power 1000 watt / 90/260VAC x 47/63Hz. USBL position-tracking system (optional).
VIDEORAY Pro 3-XE Rov. This Videoray Pro 3-XE Rov has only 42 hours on the clock and is in “as new condition” and dive ready. Total System Size and Weight is 60 kgs, packed in two water-tight Pelican cases. Rov dimensions: 30.5 x 22.5 x 21 cm. Rov weight: 3.8 kgs. Rov depth rating: 152m. The Pro 3-XE incorporates an integrated 15-inch display monitor that will display both video and a computer screen simultaneously in PAL. Forward facing wide angle color camera PAL (570 lines of resolution and 0.3 lux. Variable control tilt with 180 degree vertical field of view. Wide focus range). Rear facing black & white camera - 430 lines 0.1 lux. Two forward 20 watt high efficiency halogen lights. Rear ultra high-intensity LED light array. Two horizontal thrusters with 60 mm propellers and guards. One vertical thruster. Control console with 15 inch integrated video display. Video display tilt adjustment for optimal viewing angle. LCD depth gauge display. LCD compass with heading display. LCD cumulative hour meter display. Composite video output. Option to superimpose date, time, depth and heading information on video display. Audio annotation microphone for simultaneous recording – hard wired into console (Recording directly on to VHS cassette or DVD). User supplied PC or laptop also records data simultaneously and can capture stills. Joystick controls for horizontal movement and third axis controls. Third axis joystick control (selectable for depth, camera tilt, lights and manipulator). Vertical depth control with Auto Depth. Lighting control. Camera tilt and focus controls. Front and rear camera toggle. Tether Deployment System with 152 m negative tether, with an extension of 40 m Professional Performance Tether (total 192 m). Maximum voltage in tether is 48 volts DC. Owners Manual. Operations and Maintenance Log Book. Brass Ballast Weight Set. Calibration Tool. Spare Parts (O-rings, thruster blocks, screws, nuts, globes). Basic Tool Kit.
SLIM Rov for sale. Good condition and dive ready. Complete with vehicle, 300m umbilical, surface control station, container and spare parts. Recently upgraded electronics. 8 x 0.5hp oil filled thrusters. Length 107cm, width 60cm, height 65cm, weight in air 100kg. Speed 2.5kts. Maximum operational depth 720m. Auto depth, auto heading, auto pilot. SIT camera, colour camera, manipulator/grab. ORION ROV. A new build 45kW (60 HP),
Light Work Class vehicle with superb technical specification. Depth
Rating: 1000m, 2000m & 3000m options. Delivery six months from
order. Contact us
for full technical details.
125 HP WORK CLASS ROV (New). This Rov is a new build and comes as a complete operational package with vehicle, control cabin, and LARS. Operational depth 1000m (2000m option). Delivery sixteen weeks. Length 2500mm. Width 1450mm. Height 1800mm. Weight In-air 2400 kgs. Speed 3.5 knots. Standard Power Pack 125hp (175HP available). 94kw/125hp shaft output power, 3 phase, 4 pole, 3KV motor, oil filled and compensated. Vickers piston pump, output 220lpm @ 200bar. Video & Telemetry System. Underwater Lights. FluxGate Compass and Integrated Gyro System. Tritech SeaKing DFS Sonar. Tritech SeaKing PA200-20. Depth Transducer. Auto Heading, Depth, Altitude & Turn Rate. 7-Function Manipulator. 5-Function Grabber Arm. Hydraulic Tooling Manifold. Hydraulic Pan & Tilt. CCD Colour Camera. CCD Monochrome Camera. Aramid umbilical 41mm, length 1300m. Control Cabin. . Contact us for details.
Heavy Duty TMS. Subsea deployment cage (TMS) side entry, with electro-optic umbilical cable coiled and stored on a electro-hydraulic winch. At operating depth a powered drum feeds the tether out as the Rov exits the cage. TMS/cage dimensions: Length 3m. Width 2m. Height 3.6m. Weight in air 3.5 tons. Structure: aluminium and titanium. Installed hydraulic power unit 10HP. Flying tether: length 100m (11 power conductors, 3 twisted pairs, 3 coaxial cables, 7 low voltage conductors). Pan and tilt mounted video camera: -1 x CCD monochrome video camera (not fitted). Lights: 2 x 250 W, halogen type (not fitted). Depth sensor. Paid out tether length counter. A refit programme will be required to restore the TMS to working order. Phantom Rov. Very good condition. 2 x aft thrusters, 2 x Lateral thrusters, 1 x Vertical thruster. High-resolution colour video camera (auto focus) with pan and tilt actuator. 2 x 250w Lights. Stainless steel protection frame. Vehicle weight 73kg. Power input can be selected from 100vac to 250vac, 50/60hz. Fluxgate compass, depth gauge, auto heading, auto depth. Surface control unit, hand controller with joysticks, and TV monitor. Umbilical cable 600ft. Apache Rov. In working condition and dive ready. Depth rated to 1000m. The package consists of a basic Apache Rov, 75m of surface umbilical, surface control unit, surface transformer, tool kit, spare parts, and technical manuals. Sonar, cameras and manipulator available at additional cost. . Hyball Spares Package for sale. A large package of spare parts including Field Maintenance Kit, 'O' Ring Kit, manual, Thruster Re-Build Kit, PCB Spares Kit - Vehicle, PCB Spares Kit - Surface Unit, Hand Controller assembly with Cable, Thruster Assembly Power Module Assembly, Vacuum Valve Assembly, Pressure Transducer Assembly, Motor Gearbox Camera Rotate Assembly, Compass Assembly, Vacuum Pump & Weights, Topside Control Unit, Umbilical 300m. Plus lots more. BS -ROV (400). This Rov has an operational depth of 400m (1200ft), and was manufactured by Comex. Three thrusters 0.5Hp each (one vertical and two horizontal). Video camera hi-sensitive 10 to 100000 Lux. 2 x lights each 250w. Sounder. Compass. Depth meter. Dimensions: length 76cm, width 67cm, height 51cm. Total weight: 60kg. Umbilical cable simple coaxial type KX4 (length 300m), diameter 11mm, weight: 17kg/100 m. Surface control system includes electronic control box, joystick, camera focus, water intake alarm, auto-altitude button, auto-cap button. Colour monitor 9" (PAL and SECAM). New Rov Umbilical (100m length). This new / unused Rov umbilical is in storage, and in excellent condition. The length is approximately 100m. This tether is wound onto a storage drum. Umbilical length 100m. O.D. 31mm. 11 x power conductors. 3 x twisted pairs. 3 x coaxial cables. 7 x low voltage conductors. Sprint 101 Rov. Good condition and dive ready. Operational depth 300m. Manufactured in Norway. Includes vehicle, surface control unit, umbilical and spares parts. 5 x thrusters (0.45Hp each). Maximum speed 2.5kts. 2 x video cameras. 1 x still camera. 2 x strobe lights. 3 x subsea lights (250w each). Recorded data onto video. Power requirements 193-480vac/47-63Hz/three phase. . NUFO Rov. Recently upgraded, in good condition and dive ready. This system includes a container (EEX), A- frame and TMS. Operating depth 500m. The Rov system has a new, modern control system with a lot of very nice features. Also new thrusters. The system is ideal for subsea inspection and survey work. Cherokee Rov. Built by Sub-Atlantic. Please contact us for details. Phantom Ultimate Rov fully updated with new flying tether. Depth rating 2500ft (800m). Control console, power transformer (220vac three phase), spares, broadcast quality video camera (ROS high resolution colour camera with zoom), pan & tilt unit, 2x 250w lights, 4-function manipulator, sediment blower, and Imagenix sonar. Bandit winch with 2000ft of double armour cable. Rov weight: 800lbs. Rov dimensions: 3ft(h) x 4ft(w) x 5ft(l). Excellent package in dive ready condition. Super Scorpio Type Rov (100Hp). A heavy-duty underwater vehicle designed to carry out a wide variety of recovery, observation and manipulator tasks to a water depth of 1000m. Equipped with Sonar, TV cameras, lights, manipulators and other specialised underwater survey equipment. The ROV will also provide electrical and hydraulic interfacing for general purpose and support tooling. It is capable of free swimming or operating from a heavy-duty underwater garage (TMS) via a 150m buoyant tether umbilical. The system comprises of the Power Distribution Package, Control and Display Console, Winch Assembly, Umbilical and the Vehicle itself. The equipment requires a stable power supply of 380 - 480v, 3-phase, 60Hz at 180kva. VideoRay Rov. Operational depth 250ft. This is a very small lightweight Rov (weight in air 8lbs). Fitted with colour video camera, two external lights, and three thrusters. An ideal Rov for operations from small boats or from the back of a vehicle. Excellent condition, as new. Scorpion Rov. Built by Perry. 75Hp vehicle rated to 1000m (3000ft), two manipulators, cameras, and sonar. Complete system available with control container, workshop container, TMS, and LARS, dive ready. AC-Rov. The smallest inspection class Rov in the market place (190mm fly through). This Rov is more powerful, more robust and a more cost effective solution than all other Rovs in its class. This Rov can hover, circle, rotate on its axis, and move in any direction the target requires. Operating depth of 75-100m. A total system carry-case weight of under 15kg. The unit has been designed for inspection in hazardous and confined areas. Rov Size: 203mm x 152mm x 146mm. Weight: 3kg. Camera: Colour CCD. Thrusters: 6 thrusters (4 x horizontal vectored, 2 x vertical). Lights: 4 cluster leds (variable intensity). Tether: Options to 80m with hand reel. Tether Connection: Top, back or bottom. System Power: 300 watt (0.4hp). Payload: 300g. Inputs: 90/260vac (47/63Hz) or 124/370vdc. SeaEye Tiger Rov. Tiger Rov system (operational depth 600m) which has only 85 in-water hours over three dives, and comprises the following main components. Seaeye Tiger Rov vehicle. Launch & Recovery system (Lars) + payout system (main umbilical 200m). Garage - TMS. Spare parts, manuals, electrical drawings, electronic schematics, ancillary tools and equipment. All Rovs are sold " as is where is " unless agreed otherwise. These Rovs are secondhand, and generally will be dive ready after a routine maintenance or refit programme. Silvercrest can arrange Rov Maintenance, and Rov Pilot Training courses for purchasers. Rov refit and certification programmes can also be provided. Further information available on request. The list of ROVs available for sale and charter changes daily. Please contact us to discuss your Rov requirements. We are happy to offer a wide range of ideas and suggestions that will assist your underwater project.
(Keep scrolling down for more information on all Rovs).
ORION- 60HP LIGHT WORK CLASS ROV. ORION 60HP Type: 60 HP (45 kW), Light Work Class Rov. Depth Rating: 1000m, 2000m, 3000m options. Work Capabilities: Drill Support , Diver Support , Touch Down Monitoring, Pre / Post Surveys, Structural Inspection & Cleaning, Salvage, Seabed & Route Survey, Lay Barge Support, Plough Support, Trencher Support , Light Construction, CP survey, Pipeline Survey, Platform Survey . Total Power : 45kW (60HP), Volts 460 / 3000VAC, Amps 90 Amps (ROV), Frequency 50/60Hz (Optional). Dimensions: Length 1882 mm,
Width 1500 mm, Height
1350 mm, Mass in Air (ROV) 1000 kg (Nominal). Performance: Forward 1.75
m / s, Lateral 1.5 m / s, Vertical 1.0
m/s, Turns Rate 120
Degs / s Payload: Standard 200 kgs,
Additional 100
kgs, Thru Frame Lift 1500
kgs. Frame:
SS316 & Al T6061 Propulsion: Type: 3 Phase Induction, Model: SDE 300, Motor: ROV54-6-400-4, Electrical Power: 4.3kW , Speed Control: AC VFD 695V. Speed 0-750RPM, Voltage: 400VAC (@ Motor). Frequency: 0-50Hz. Diameter: Ǿ 300mm. Blades: 3. Horizontal : 4 x Vectored. Vertical : 2 vectored. 1 Vertical in Tunnel. Aux
Hydraulic Power Pack x 1: SDE
10kW / 3kV / 60Hz / 4 pole hydraulic Power-pack for manipulators & tooling. Auxiliary
Hydraulic Valve Pack x 2 .
Type: General
Function . Model:
SDE 10 Stn x 2 . Valves
: Wandfluh NG3-Mini. Power:
24VDC. Control: RS485
'Intelligent'. Pressure: 200BAR
(Adjustable). Flow: Proportional. Video: Video channels Fibre Optic (SM- MM) 8 Lighting: 300W / 120VAC - Variable Intensity
x 6 Telemetry
System: Transmission : Focal 907 F.O. Dual Fibre. Control: Siemens PLC Control & Navigation: SDE SF1000 PLC Control System . Flux Gate Compass (gyro optional). Tritech Seaking Sonar.
Digital depth transducer .Auto Heading. Auto Depth. Auto Altitude. Turns Rate. Manipulators & Tooling: Hydrolek 7 Function, Rate Control (Std), Hydrolek 4 Function Rate Grabber (Std) , SDE 10 Stn Hyd: Valve Pack / 200 Bar , Rigmaster 5F Rate Control (Optional) , Orion 7PE Position Control (Optional) . Cameras
(Std Fit). Near SIT Low Light Monochrome.
Colour CCD . Rear Colour or Monochrome CCD.1 Cameras
(Optional): Stills, SIT, Boom Cameras, Colour CCD Zoom,
Manipulator Camera. Pan & Tilt: Electric
Pan & Tilt, 24VDC - Heavy Duty .
Electric Tilt, 24VDC - Heavy Duty
. Sensors (Wired
as Standard): Manipulator 1, Manipulator 2, Gyro, Sonar - RS232 or RS485
, Sonar - Arcnet , Aux Reservoir Comp 1 , Aux HPU
Motor Temp 1 Sensors (Optional): CP Probes , Bathymetrics, FMD , Side Scan Sonar , Inertial Navigation System, User Definable Interfaces 1.5kW / 120VAC, User Definable Interfaces 1.0kW / 24VDC . Control / Workshop Container . (Zone 2 Optional) TMS (Optional) Launch & Recovery System (Optional) Umbilical: 1000m Aramide Armoured, SWL
33 x Power cores , 6 x
FO SM + MM in SS tube. 2000m and 3000m Options available 125 HP WORK CLASS ROV (for
sale).
This Rov is a new build and comes as a
complete operational package with vehicle, control cabin, and
LARS. Operational depth options are 1000m (2000m depth option
available). TMS not included but available as an optional extra.
Delivery and Price on application.
125 HP Workclass Rov.
Work
Capabilities :Drill Support,
Construction Support , Cable and Pipeline Pre and Post
Lay,Survey,Platform Inspection and Cleaning LE. Depth
Rating
Standard Depth Rating 1,000 metres . Optional Depth Rating 2,000 and 3000 metres
Total Power Rating 125hp (option of 150Hp and 200Hp)
Dimensions & Weight Length 2,500 mm
Performance Forward 700 kgf 3.5 knots , Lateral 550 kgf 3.0 knots, Vertical 500 kgf 1.5 knots
Payload of Standard Vehicle 150 kgs . Optional
Additional Payload 50 kgs Through Frame Lift 2,500 kgs
Propulsion System
7 350mm diameter 10kw/13.5hp hydraulic thrusters individually servo valve controlled
Vectored 4 x 350 mm Ø thrusters Vertical
3 x 350 mm Ø thrusters Standard
Power Pack 125hp (175HP
available). 94kw/125hp shaft output power, 3 phase, 4 pole, 3KV motor, oil filled and compensated.
Video & Telemetry System (Fiber Optic optional fit).Transmission via fibre optics and copper.
Fiber Optic, 3 video + 6 RS 232 / 485 channels. Copper, 3 Video + 8 Data Lines.
Real-time Video Channels, 3 on Coax / 3 on Fibre.
Lighting 2Kw available from 4 x 500 watt dimmer channels. 250/500 watt 3000m Rated Lights x 4 Control & Navigation Flux Gate Compass and Integrated Rate Gyro System.Tritech SeaKing DFS Sonar system. Tritech SeaKing PA200-20.Depth Transducer System.Heading, Depth, Altitude & Turn Rate .
Standard Components 7-Function Rate Manipulator. 5-Function Rate Grabber Arm.
10 Station Solenoid Valve Pack. Hydraulic Tooling Manifold. Hydraulic Tooling Servo Valve.
Hydraulic Pan & Tilt. CCD Colour Camera. CCD Monochrome Camera.
Power Packs & Tooling Interfaces Hydraulic Power Pack
125hp
(Optional extras) Tooling Power Pack 50hp
Schilling 7-Function Titan T3
Schilling 5-Function RigMaster Grabber Arm
Guide Wire Cutter
75mm diameter Wire Rope Cutter
Disc Cutter / Grinder
API Standard Hot Stabs
API Torque Tools
Standard AX / VX Ring Tools
Special tooling available requirements on request. Sensor Interfaces (optional fit) Prizm or Focal Single Mode Video/Data Transmission, 8 Video + 16 Data Channels, Fiber Optic Gyro Compass with Pitch and Roll Sensors, TSS Pipe Tracker, CP Inspection Sensors, BATHY Hi-Resolution Depth and Altitude Sensor , DHSS Dual Scanning Sonar System, USBL , FMD, Side scanner sonar , Spare Bulkhead Connectors. User Power Supplies - 1kw @115VAC, 750VA @ 24vdc The standard Aramid umbilical is 41mm in diameter
and has the following cores:
15 x 4mm sq 3kv Rated Power and Earth Cores
3 x 75 ohm Coaxial
4 x Screened Twisted Quads
4 Single + 4 Multi Mode Fibres in a common loose tube Standard length 1,300 meters. CONTROL CABIN LARS . Length 6,000 mm, Width 2,440 mm, Height (shipping) 2,774 mm, Height (operational) 6,000 mm
, Shipping Weight 15,000 kgs
AC-ROV. (Possibly the best small Rov in the market). The smallest inspection class ROV in the market place (190mm fly through). The AC-ROV is more powerful, more robust and a more cost effective solution than all other ROVs in its class.
These facts however are secondary to the real capability of the AC-ROV. All underwater ROVs have a flight pattern that reflects the movement of an aeroplane (3 degrees of movement) - this means that when inspecting or observing a target the ROV must constantly move in and then away to take up a fresh viewing position. The AC-ROV however has the underwater flight pattern of a helicopter - this allows the ROV to hover, circle, rotate on its axis and move in any direction the target requires. This breakthrough is achieved by six internally housed thrusters that produce five degrees of movement. With an operating depth of 75-100m, a total system carry case weight of under 15kg, and a service life of 200-300 hours at 100% duty (continuous full depth & full speed), the AC-ROV has been designed for inspection in hazardous and confined areas.
AC-ROV - TECHNICAL SPECIFICATIONS. Model: SP50 Size: 203mm x 152mm x 146mm (8" x 6" x 5.75") Weight: 3kg (6.6lbs) Depth Rating: 75msw Camera: Colour CCD Thrusters: 6 thrusters (4 x horizontal vectored, 2 x vertical) Lights: 4 cluster LEDs (variable intensity) Control: 5 axis SPACEMOUSE (LH or RH) 8 function buttons Monitor: 5.6" colour TFT LCD Video: Overlay Date, Time, Depth (optional) Sensors: Temperature and water ingress Tether: Options to 80m with hand reel Tether Connection: Top, back or bottom System Power: 300 watt (0.4hp) Payload: 300g (8oz) Inputs: 90/260vac x 47/63Hz or 124/370vdc Outputs: Video 1, Video 2, Diagnostic Handling: Under 15kg (complete system). 490mm x 380mm x 190mm Options: Rear View Camera and lights Depth sensor Manipulator Slip ring reels
The AC-ROV has a two- function manipulator (option). The manipulator combines grip and full continuous wrist rotate via a ground breaking drive-train, resulting in the smallest two-function manipulator in the ROV market. Consisting of titanium, aluminium, stainless steel and plastic components, the AC-ROV micro-manipulator system comes completely integrated into its own bottom buoyancy block. There are no underwater cable connections thus limiting snagging potential, while the integrated nature of manipulator and block gives the system inherent strength and robustness - a feature demonstrated by all AC-ROV components. Simply remove the standard bottom block from your AC-ROV and fit the manipulator block, the manipulator is 100% interchangeable between individual AC-ROV units, giving maximum functionality and cost savings. Topside control is a thumb activated one handed joystick controller that simply connects directly to the control box without need for modification, with all manipulator operations viewed via the state of the art camera system. Two and three jaw options are available and customers can specify special gripper heads for specific jobs. Three screws secure the jaw assembly to the arm and change-out could not be easier. Notes.
A computer is not required for normal operation nor included in the supply.
ULTIMATE PHANTOM ROV.
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Using the built in KVH fluxgate compass and precision depth sensor, the Ultimate Phantom Rov can conduct precise search patterns under close loop control of the depth and heading. The 50kg payload is only partially used up while carrying a four-function Hawkes Sensory Manipulator, 0.5 h.p. sediment blower, 400 watt HID arc light/light ballast system, 0.25 hp. suction cup manipulator end-effector, and a broadcast quality camera. The variable rate, open loop manipulator control
system and multiplex ROS High Resolution Colour Camera. The camera system has a local-record capability, zoom and manual/focus selectors. VHS Video Recorder (day, date, time) Video Overlay System with Depth, and Heading. Simrad MS1000 Colour Scanning Sonar. A spare shielded twisted pair cable is available
in the umbilical for The 19-inch rack control console for the Ultimate Rov is powered with either 220 VAC/three phase or 240 VAC/single phase power. The console can either be installed in a portable shock mounted shipping case or within a 19-inch rack system inside it's dedicated 20-ft. control van. A high performance Bandit Winch is included with the Ultimate Rov system. Together with a Control Console, Spares Kit, Tool Kit, and Power Transformer.
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
100 HP ROV SUPER SCORPIO TYPE. |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 1. Introduction This Remote Operated Vehicle (Rov) is a heavy-duty underwater vehicle designed to carry out a wide variety of recovery, observation and manipulator tasks to a water depth of 1000 metres. The Rov is equipped with Sonar, TV camera's, lights, manipulators and other specialised underwater survey equipment. The Rov will also provide electrical and hydraulic interfacing for general purpose and support tooling. It is capable of free swimming or operating from a heavy-duty underwater garage (TMS) via a 150m buoyant tether umbilical.
2. System Description The system comprises of the Power Distribution Package, the Control and Display Console, the winch assembly, the umbilical and the Rov itself. The equipment requires a stable power supply of 380 - 480v, 3-phase, 60Hz at 180kva. 2.1 System Performance The Rov can be operated from a fixed installation
up to a sea state 4 whilst free swimming and up to a sea state 6
while being TMS operated. During support vessel operation the limits
are, sea state 4 free swimming and sea state 6 for TMS operation. The vehicle is powered by 2 axial, 2 vertical and 2 lateral 15 HP thrusters. It is capable of operating in currents of 2 knots to a depth of 1000 metres. The modular buoyancy provides a vehicle payload of 100kg and the safe working load of the lift frame is 2500 kg. 2.2 Surface Equipment The surface equipment comprises a control cabin and a deployment system and an electro hydraulic winch. 2.3 Control Cabin The Rov control cabin is a 20' x 8' steel container which houses all the Rov control equipment. The cabin is divided into two areas, the operators control console section and the power distribution section. 2.4 Operators Control Console The major items of equipment in the console section are: - Power Supply control panels 2.5 Surface Electronics System The surface electronics system consists of the operators control console and other specialised equipment which is fitted into standard 19" racking situated either side of the pilots seat. The operators control console provides the interface for control of vehicle motion and the onboard support equipment. The drawer system contains: - Attitude display processor The principle elements of the system are the surface electronics control and patch drawers. These house the surface multiplexer, surface interface board and cross connect area that links individual components to form the control and signal interfaces. The upper right hand drawer contains the power supply units, the multiplexer chassis and control components. The multiplexer chassis is connected by ribbon cables via the patch drawer to the operator control unit. This arrangement connects the analogue, control and miscellaneous commands from the operator via the following input devices: - Joysticks Analogue command inputs are routed to the patch drawer where some of the signals are diverted for conditioning or interface with the attitude display processor. Vehicle motion control signals, joystick commands and trim voltages are routed to an interface board that is a 37 way module located in the patch drawer. This set up allows the signals to be summated and calibrated for offset or gain prior to transmission to the vehicle control system via the data multiplexer. Analogue output channels from the multiplexer are routed within the surface electronics unit, then transferred to the computer for processing and display on the attitude and status indicators. 2.6 Surface Multiplexer The surface telemetry control subsystem is built into the electronics unit. The subsystem comprises a multiplexer chassis that consists of a set of printed circuit boards housed inside the surface electronic unit. The set of PCB's comprises: - 1 x Mother Board The surface multiplexer subsystem is designed to operate as the master controller of the overall system, thus all system timing is originated by the surface end of the datalink. 2.7 Umbilical Winch The umbilical winch is an electro hydraulically driven unit, which is spooled with 1200 metres of umbilical. The winch assembly comprises: - The electro hydraulic power unit 2.8 Winch Connections Rov power and control signals together with the winch power supply are routed from the control cabin and power distribution unit via separate deck cables. The Rov control signal cable is connected to the winch static junction box and the winch power supply is connected to the winch junction box. The slipring unit is mounted on the winch drum axis. Internal leads from the sliprings are linked to the rotating junction box to which the Rov umbilical is connected. 3. Rov Umbilical There are two types of Rov umbilical cable available to suit specific operational requirements. One type is steel wire wound whilst the other is Kevlar braided. Both types of umbilical transmit the power, data, and video signals to and from the Rov.
Deployment and recovery of the Rov is by means of a Latch - Lock system that also acts as a guide for the umbilical. The latch - Lock dogs are hydraulically operated by means of an Enerpac hand pump. Depending on the configuration of the support vessel either an "A" frame or an articulated crane may be used to deploy the Rov. 5. Remote Operated Vehicle The Rov is a heavy-duty underwater vehicle designed to complete a wide variety of tasks to a depth of 1000m. 5.1 Rov Main Frame The Rov frame is an open frame design, constructed from HE30 aluminium I beam and channel that give good strength to weight ratio. The frame is fitted on the base and outer surfaces with HDPE rubbing strips to protect it from damage during deployment and recovery. HDPE is a buoyant material when in water therefore adding no weight to the vehicle when sub sea. 5.2 Buoyancy The vehicle is held in a vertical attitude by means of six contoured blocks of elastomer coated syntatic foam. There are three on each side of the top frame. 5.3 Electronics The operating system has been designed around hardware driven Time Division Multiplex (TMD) telemetry datalink. The system is half duplex and provides a reliable communications link between the surface control equipment and the vehicle control / sensors system. The vehicle primary electronic control and interfacing components are mounted inside two electronic pods. Connections to the external equipment are made through 24 pin Burton sub sea connectors. Penetrators are placed radially on the pod end dome and each has a connector re mounted on the forward face. Each connector receptacle mates to a matching cable plug on the cable assembly. The port pod contains the following: 1. Multiplexer Chassis - PCB's which for the vehicle
multiplexer sub system. The Starboard electronics pod contains the following: 1. Power Distribution System - DC power supply
units producing supply voltages for camera's, lamp, Controllers,
solid-state relays, cathodic protection, Fibre optic, multiplexer
and cooling fan. 5.4 Vehicle Multiplexer The vehicle datalink system is housed inside the port electronic pod. It comprises a multiplexer chassis and a set of PCB's as follows: - 1 x Programme Board The vehicle multiplexer system is designed to operate as a slave controller of the system, thus all system timing is received from the surface end of the data link. 5.5 Sensors Interface Subsystem The multiplexer analogue output and input boards are interconnected with the sensor chassis set of PCB's. These boards quantify the control commands from the multiplexer to ensure the correct operation of output devices, such as thrusters, and sensor inputs (for use within onboard feedback control circuits and transmission to the surface). The sensor chassis set of PCB's is as follows: - Mother Board 5.6 Hydraulics Hydraulic Power for the vehicle system is provided by an electric motor driven Hydraulic Power Unit (HPU). It has an operating pressure of 3000psi, and a flow of 110 liters per minute. This unit supplies motive power for the vehicle, the manipulators, the pan & Tilt movement and tooling. The system is protected from contamination by a high-pressure flow filter and low-pressure return filter. 5.7 Propulsion System The vehicle is propelled by two vertical, two axial and two lateral thrusters. These thrusters are hydraulically driven with proportional control provided by servo valves located in the Thruster Control Unit. The thrusters operate at full system pressure. The six electrically controlled servo valves are mounted on a manifold inside the thruster control unit where they are connected via cabling to the main junction box. 5.8 8-Way Hydraulic Control Units The two 8 way Hydraulic Control Units consist of auxiliary valve packs of eight solenoid operated two-way valves. The hydraulic control units are supplied from the high-pressure manifold via a 1000psi pressure-reducing valve. HCU No. 1 operates - Pan & Tilt units & 5 Function manipulator or tooling. HCU No. 2 operates - 7 Function manipulator or Tooling.
A seven-function manipulator is situated on the port side of the front of the lower frame and a seven function similarly mounted on the starboard side, both are powered by the HCU located behind each manipulator.
The umbilical is connected to the vehicle via the Survey Junction Box located in the center of the frame; all power and signals are distributed from the junction box to the Electronic Pods and other functions. 5.11 Compensation Systems There are compensation systems built into the Rov distribution system. Hydraulic: There are five compensators fitted, two are fitted to the Dual HPU reservoirs the other three are mounted between the front frame legs and supply the main system, HPU Motor and Termination Junction Box. 5.12 Underwater camera's There is provision for up to eight camera's which may be required if the vehicle is used in survey mode. 5.13 Underwater Lighting There are six variable intensity lights fitted
to the Rov these are individually controlled. They provide an output
voltage up to 120v that is proportional to a 0v to +5v DC control
signal from the vehicle multiplexer system. The DC signal is used
for phase angle control of a Triac on the AC supply. The scanning sonar system comprises a display processing unit and an underwater scanner, which is centrally mounted at the front of the vehicle. These units are directly connected, via the umbilical, by a pair of shielded conductors that form the telemetry link. The sonar interface is suitable for a Sea King Sonar system or similar, the DC power is switchable via a solid-state relay mounted in the starboard electronic pod. 6. System Specifications
Length 3000 mm Excluding Front Bump Bar 6.2 Structure Frame Aluminium Alloy HE30 Grade 6.3 Vehicle Hydraulic Power Unit Electric Motor Sub Atlantic 100HP 3000v 4P / 300v
60 Hz 6.4 HPU Status Sensors Depth Kulite KPM 780/AR/SPL 0 to 1000 psi. 6.5 Status Sensors Temperature Platinum Film Resistor 6.6 Operating Fluids Vehicle Hydraulics Shell Tellus 22 or equivalent 6.7 Thruster Control Units Servo Valve Moog Type E077 Model 685 6.8 Thrusters Motors Innerspace Type 4200S - 15 6.9 2 X 8 Way Hydraulic Control Units Control Unit Manufactured by Perry Tritech
Electric Compensation 1 x 1.3 litres capacity 6.11 Manipulators Port Manipulator 5 Function 6.12 Pan & Tilt Unit Hydraulic Pan & Tilt Tritech Model PT 3636
c 6.13 Underwater Camera's Low Light Monochrome Camera Tritech Tornado 6.14 Vehicle Main Sensor Equipment Scanning Sonar Tritech Super Sea King DFP 6.15 Rov Control Cabin Container Ferguson Seacabs 20 Ft x 8 Ft x 8 Ft
Power Transformer 130 Kva 360-380-400-420-440-460-480v-delta Power Transformer MCI Electronics Remote Monitoring Panel 19" rack fitted with metering, pushbuttons and indicators. Control Console 3 x 19" Racks fitted with Operators
Control Unit and |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
HYBALL ROV.
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Hyball is a compact, portable system comprising the Remote Operated Vehicle (Rov) and a Surface Control Unit with built in colour monitor, and all Rov controls.
An appropriate length of umbilical connects the Rov to the Surface Control Unit providing the telemetry, power and video link between the two units. Hyball comes standard with the most comprehensive video overlay of any Rov in its class and all the auto functions that you would expect of a professional system. Useful accessories can be added to the system to extend its operational capability. Hyball's unique feature is the patented meridian view port that allows the internally mounted camera to tilt and view through 360 degrees. Panning of the camera is achieved by rotating the vehicle, which can turn on its own axis. This combination of camera movement and vehicle maneuverability provides you with the ideal remote controlled subsea video inspection package for coastal and inshore applications. In Hyball we provide you with the very latest in colour video cameras for unbeatable video quality. Currently we provide a JVC 470 line resolution, 0.95 lux colour CCD camera with an F 0.8 Pentax lens as the standard video camera.
Propulsion The carbon/ceramic spring loaded shaft seals and motor brushes have a service life of 500 hours in normal operation down to 300 metres (1000 feet). They can be replaced on all four thrusters in less than an hour by removing the thruster from the outside of the vehicle. Thruster speed and direction is controlled by digital signals proportional to the movements of the joystick. Built in protection prevents overheating and overloading of motors. Ramping of motor speed is software driven through a dedicated microprocessor to give smooth operating performance. Lighting. Viewing System. The video picture is sent to the Surface Unit and is displayed on an integral 14-inch high-resolution colour monitor. Either PAL or NTSC format is available. A BNC outlet is provided for a video recorder. We recommend that an S-VHS or Y/C video recorder be used that is capable of recording the high quality video from Hyball, which has greater than 460 line resolution. (A standard domestic VHS recorder can only resolve about 270 lines resolution). Three cameras can be mounted on the standard camera chassis - the standard camera, a low light monochrome camera and a photographic camera. Sensors. Depth. Direction. Camera Position. Leak Detection. Electrical Protection. Ground fault interrupters and circuit breakers are installed to
protect both the surface unit and the vehicle. Vehicle heading, depth, time and date. Controls. Length 18.00ins (455mm) Umbilical.
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
APACHE DEEPWATER ROV SYSTEM.
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||
ROV with TMS.
The system has recently been fully serviced and inspected by the manufacturer, and is in very good condition. In addition to the basic Apache Rov / TMS / Surface Control Unit components, this Rov has the following extra equipment fitted: - Additional Kongsberg Colour camera |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
SEAEYE TIGER ROV.
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
The following paragraphs comprise the major components and listings of this SeaEye Marine "Tiger" Rov. Including its Launch & Recovery System (LARS), Tether Management System (TMS), and Spares. This Tiger Rov system has only 85 in-water hours, over three dives and comprises the following main components. Seaeye Tiger Rov Vehicle Launch & Recovery System (Lars) + Payout System (main umbilical 200m) Garage - TMS Spare Parts Manuals, Electrical Drawings, Electronic Schematics, Ancillary Tools and equipment.
SEAEYE ROV. Sale Details: SeaEye Tiger Rov Surface Unit Model BSU (D) Transformer Unit Model 6TU/2 Digital Hand Controller Unit (Joystick), model HC(D) Manipulator Arm, model M7 Manipulator Control, model MSU LAUNCH & RECOVERY SYSTEM (LARS) + PAYOUT SYSTEM LARS: SEAMAC MODEL 3525 EHS LARS - PAYOUT SYSTEM: Hydroactive Level Wind Option LARS A-Frame Handling System c/w flatbed - container platform 30 conductor S/S encase Slip Ring Assembly mounted in shaft 22" dia overboarding sheave 8RDX 4" LP thread. 12' long heavy duty Cable Payout, Tension, Speed monitoring system Spare parts kit for model GARAGE - TMS GARAGE TMS Control Unit, SeaEye model INSSC(D) 200m Main Lift Umbilical (Steel reinforced cable), AMLC 125 meters Rov Tether cable 300 meters umbilical free-running cable CONTROL ROOM PERIPHERALS Simrad MS-900 Sonar inc. Processor Sonar monitor, Philips, mod 105 E 19 Video Monitor Unit, Sony, model PVM-14500-M VCR Sony model SLV-LX8SC Rov Peripherals shelving, + two seats Electrical installation. VEHICLE AND SURFACE UNIT (SU) SPARES. 1 x Thruster motor MS4 and 1 x Thruster motor MS4 2 Propellers for SM4 2 SM4 shaft seals 2 Lamps protectors 2 Sockets for lights 2 halogen lamps 1 Sonar connecting cable 1 Hand Control Unit cable connector, HCD/05 1 Surface Unit connector/Transformer 1 Plastic bag with different type fuses 1 Plastic bag stainless steel bolts 7 stainless steel 6 mm nuts with seals 1 Female 10 pins Birns connector 1 Female 3 pins connector 1 Female 3 pins connector 1 Female connector 4 pins 1 Resistance SKE 400 1 Tilt motor UMBILICAL SPARES 1 resin epoxy, potting compound bag 1 Chinese Finger 1 TIGER excursion umbilical 325 meters 1 Excursion Umbilical 140 mts INTEGRATED CIRCUITS (ICs) SPARES Card serial : Nr N10255 - N 527 CD0477 Card serial Nr 6051 - 6040 - 6045 - 6033-104 - 6041 - 6033-103 SBC -68 - 6008 - SUBSEA 485V1R2 - 6034 - 6035 6034-P - 6046 - 6022 - 6056 -P - 6033 - 6047 - 6051 AP Software U5ROBSBC68 CPU 6033 VIDEO CARD 029 / 403-87S TMS and SEA MAC WINCH SPARES 2 "O" ring TMS E-Pod 1 Slip Ring IEC 1 OMRON limit switch 1 OMRON switch 2 Switches SER.A D5-3X10 1 Shuttle valve model ASH 1 Glycerine manometer WIKA 0-5000 psi 1 SOL.A power supply 1 DANFOSS Solenoid valve 2 CANON 90º connectors part nr 108E18-325U (SR) 1 Flux valve compensator 1 Transformer MICRON 1 Control valve SAUER SUNDSTRAND 1 Starting switch motor 1 Valve compact control 2 DANFOSS Hydraulic valve 1 PARKER Hydraulic motor (repaired) SEA-MAC winch GARAGE (CAGE) SPARES Plastic bags with "O" rings and seals for SMS thrusters and umbilical excursion mechanism. 1 thruster shaft ser. DK 626 (excursion umbilical) 1 Ordenator chain 1 Ordenator chain DK-251 1 Ordenator chain DK-255 1 Ball bearing extractor SYKES-PICKAUANT 1 gear wheel plastic 1 bag 2 oil seals DK-210 2 Ball bearings 1 plastic sheave DK 134-50 mm roller. DOCUMENTATION 1 SeaEye Tiger Technical Manual 1 SeaMac Model 3530EHLWS System Manual 1 SeaMac Payout, Speed, and Tension Line Monitor System Manual 1 Simrad Mesotech 900 Operators Manuals 1 TMS/Garage System Manual 1 SeaEye Surface Unit System Manual 2 SeaEye 600 manuals All Documentation, Manuals, Electrical Drawings, Electronic Schematics, and all instructional and technical supporting, and maintenance documentation associated with all Ancillary Tools and Miscellaneous Devices are included in the sale. TIGER ROV TECHNICAL SPECIFICATION.
Maximum operating depth: 1000 metres Dual video channels 32 Kg (70 Lb) payload 4 Vectored and one vertical Seaeye SM 4M thrusters with velocity feedback Auto heading and depth Thruster trim functions Fully interfaced for sonar and CP probes 3 Phase power outlet option Single or 4 function manipulator option TMS system Free swimming mode 300 watts of variable intensity lighting Integral video overlay Video
THE SEAEYE TIGER is widely regarded internationally as the standard observation and inspection ROV for operations to depths of 1000 metres in the offshore oil and gas industry. Its performance in strong currents, excellent handling and manoeuvrability are unsurpassed. A Seaeye Tiger can be operated free swimming with up to 450 metres of umbilical or from a Type 2 or Type 5 TMS system to its full working depth. Seaeye Tigers are open frame construction providing greater scope to fit additional accessories and more capable manipulators than 'eyeball' ROVs. This open frame construction also allows the horizontal thrusters to be mounted in the most efficient vectored arrangement providing far greater thrust in both forward and lateral directions than earlier axial and lateral thruster combinations. A basic ROV system comprises the Vehicle, a Surface Control Unit a Hand Control Unit and a Power Supply Unit. The surface Control unit and PSU can be supplied free standing or as a containerised system. This Control Container can be Zone II rated or rated for safe area operations. It is air conditioned as standard. Free swimming operations are possible with up to 450 metres of tether. For operations with umbilical lengths greater than 450 metres it is necessary to use a Seaeye Tether Management System (TMS). This can either be the economical Type 2 bale arm system providing an excursion range of 140 metres or the superior Type 5 TMS which is a winch and slip ring arangement. The Type 5 TMS with its variable garage opening height provides ROV excursions from the TMS of up to 240 metres.
The manufacturer offers a skid mounted 'A' frame and lifting winch with 1100 metres of armoured lift umbilical as a compact combined unit to launch and recover a TMS garaged Seaeye Tiger. Alternatively an articulated crane and winch unit can be offered mounted on a gravity base. These options can be offered rated for hazardous area Zone II operations or for 'safe area' operations and are known as a 'LARS' or Launch and Recovery System. Alternatively you may have your own crane available and may only require the lifting winch and armoured umbilical with an umbilical sheave and a lock-latch release mechanism and vehicle bullet for launch and recovery. Specifications Maximum working depth 1000 metres Length 1030 mm Height 590 mm Width 700 mm Thrust Fwd 62 kg Thrust Lateral 43 kg Thrust Vertical 22 kg Weight 150 kg Payload 32 kg
Propulsion All Seaeye ROVs feature brushless DC thrusters which, apart from having the greatest power density, have integrated drive electronics with velocity feedback for precise and rapid thrust control. These thrusters are interfaced to a fast PID control system and a solid-state rate gyro for enhanced azimuth stability. These essential building blocks enable Seaeye Marine to provide superior control and response from their powerful ROVs and set them apart from the competition. Four vectored horizontal and one vertical SEAEYE SM4M brushless DC thrusters propel Tiger and provide full three-dimensional control. Chassis The 100% modular chassis is manufactured in polypropylene. This extremely rugged material is totally maintenance free, non corroding and self supporting in seawater. Additional equipment can be bolted directly to chassis members. Pressure Housings All housings are machined from 6082 marine grade aluminium and hard anodised black. The main electronics pod is fitted with a water ingress alarm that displays on the video overlay if activated. Connectors Seaeye's range of 316 stainless steel connectors are generally used throughout. Buoyancy Is provided by a single moulded syntactic foam buoyancy block with apertures provided for a sonar head and a transponder or responder. Control System & Video Overlay A 16 bit digital control system provides easy interfacing of ancillary equipment by the operator. The SEAEYE comprehensive video overlay is fitted as standard providing digital and analogue compass rose, tilt icon, date time group, depth (metric or imperial), CP value ,and pre-titled and free text pages. Vehicle data may be exported to a client's Survey or Navigation computer via a PC using the SEAEYE Telemetry Monitor Unit that is provided as part of the standard Seaeye Tiger spares kit. Navigation Compass A sensitive flux-gate compass unit with solid state rate sensor is incorporated for enhanced azimuth stability. Specifications: Accuracy± 1°, Resolution0.351°, Up-date rate98mS.
Depth Sensor Electronic unit in its own separate housing. Accuracy ± 0.1% of full scale deflection. Auto-pilot and Thruster Trim Functions Full automatic pilot is provided for depth and heading. Thruster trims are provided on the hand control unit. Tilt System The cameras are mounted on a tilt platform providing ±90° of tilt. The tilt mechanism is fitted with a positional feedback potentiometer and camera tilt angle is displayed on the video overlay. Lighting Two individually fused SEAEYE 150W lamps are provided with remote brilliance control. Both lamps are positioned on the camera tilt unit to follow the camera tilt angle for optimum scene illumination. Video System Two simultaneous video channels are provided. Video transmission is via screened twisted pairs from the vehicle to the TMS and a single fibre-optic from the TMS to the surface. A 14" colour monitor PAL/NTSC is supplied as standard. Surface Control Unit This unit contains all of the vehicle system surface control electronics, TMS control and surface outlets for ancillary equipment. It is 19" rack mountable and is supplied in its own case. Hand Control Unit A small remote hand control unit containing all system controls is provided and supplied on a 5m flying lead. Surface Power Supply Unit Supplies all power requirements for the vehicle system. Line Insulation Monitors (LIMS) are fitted to both AC and DC power components for safety and monitoring purposes. Requires 3 phase AC input of between 380vac and 480vac at 11kva. SPECIFICATIONS MAY CHANGE WITHOUT PRIOR NOTICE. Tel: England (+44) 1285.760620 EMAIL: sales@SilvercrestSubmarines.co.uk
ROV NEWS FROM AROUND THE WORLD.
DEEPOCEAN PICKS NEW LEOPARD CONCEPT FOR MV DEEP HELDER DeepOcean has opted for the new concept Leopard ROV from Saab Seaeye. Seen as the most powerful ROV of its size in the world, its combination of 11 thrusters, unrivalled payload, and a host of advanced technology features won over DeepOcean, which itself is an innovator in providing subsea services. "It's a pioneering design from Saab Seaeye - a company with a track record of innovation," says Rick Green, Regional Manager Netherlands at DeepOcean, "and will be a valuable addition to our fleet. "Environmentally we wanted an electric vehicle - yet one with work class performance. "For our application the Leopard gives us the equivalent capability of a much larger hydraulic work class vehicle - and its 11 thrusters means it can handle strong currents - and that's important to us." He points out that with eight horizontal thrusters and three vertical thrusters the Leopard can hold steady in strong cross-currents. Rick Green also likes the ROV's inventive new chassis concept. Its large open payload bay allows for ample tooling and survey sensors to be installed on sliding trays for rapid reconfiguration and easy maintenance. It means, he says, that a survey-grade INS system can now be easily integrated inside the vehicle.
RECORD SWIM FOR HIBBARD WITH SABERTOOTH. Hibbard Inshore has set the record for the longest flooded tunnel inspection against flow ever attempted. Success came from using the Saab Seaeye Sabertooth AUV/ROV hybrid, chosen as the only possible vehicle for the job. Used as a tethered ROV, which was extremely important to Hibbard for real time data feedback, vehicle control, and safety measures, the Sabertooth swam the eight kilometres of tunnel against a 0.3 metre-per-second flow whilst fitted with a range of surveying and filming systems. This achievement kept the vital water supply flowing to Rio Tinto's aluminium smelting plant in British Columbia during the inspection mission. Speed was essential as the flow was reduced during the mission and a 'very fast' inspection in an eight-hour timeframe was needed, says Dave Malak, Director of Hibbard Inshore. The Sabertooth was fitted with a combination of multi-beam systems and cameras to provide 3D profiling of the tunnel, along with a record of the tunnel wall status and HD video examination of areas of concern. For Rio Tinto the 40 year-old tunnel is a critical asset that needed a thorough examination to reveal areas of potential collapse for maintenance planning and to provide comparable data for trends in tunnel condition. Hibbard's success follows their record-breaking 24 kilometre tunnel inspection inside Australia's Snowy Mountain hydro scheme where they also used the Sabertooth in its tethered mode.
The Sabertooth concept combines the technologies of both AUV and ROV vehicles into a single unified resource to give operators the range and manoeuvrability of an AUV, yet with the tooling capability of a light-work ROV. Hibbard Onshore were first to spot the potential of the Sabertooth concept, recognising the advantages of a vehicle that has 360 degree manoeuvrability, a sleek hydro-dynamic design, efficient thrusters and accurate navigation - and an ability to cope with flowing water in a confined space. They also saw the benefit of battery technology that could operate the Sabertooth over extremely long distances under its own power so that only a thin fibre-optic cable need be used when necessary.
The new Leopard is the most powerful compact work-class ROV in the market. With 11 thrusters, unrivalled payload, and a host of advanced technology features, the new Saab Seaeye Leopard is the most powerful ROV of its size in the world. Aimed at the compact work-class market, the Leopard can handle more tooling, cameras and survey equipment than any other ROV in its class. The minimal deck footprint of the Seaeye range is maintained with the combination of a 20 x 8ft single lift, A-Frame & winch LARS and a 20ft control cabin for easy transport and rapid mobilisation. Its pack of eight horizontal thrusters and three vertical thrusters gives the Leopard exceptional thrust, powering the vehicle forward at over four knots, and enabling it to hold steady in strong cross-currents. For the pilot, the vehicle's iCON intelligent control system gives clear and enhanced information whilst independently managing each device on the vehicle, including auto redundancy that will keep the ROV working even with multiple equipment damage. The pilot will also find that it delivers better handling characteristics - including pitch and roll stabilisation for the best quality survey data and to allow stable flight even with large tools and sensors deployed. Designed with the pilot in mind, the Leopard has other inventive features to make life easy for the operator in the field. For instance the networked design of the iCON control system has refined the main electronics pod into an intelligent power distribution and data hub, and re-located the brains of the system into sensors and actuators around the vehicle. This provides greater information for the user and makes maintenance far simpler and quicker. This innovation also avoids the need to partially dismantle the ROV to reach its electronic heart. And it offers building-block simplicity for equipment changes along with remote internet access for upgrades and support. The chassis has been designed with rapid reconfiguration and easy maintenance in mind. A large open payload bay within the vehicle allows for ample tooling and survey sensors to be installed rapidly on sliding trays. Its one tonne through-frame-lift capability and four point docking system for tooling skids allows more demanding payloads to be added. The combination of new chassis design, iCON building-block concept and exceptional power, means that more interchangeable equipment can be fitted than ever before in a vehicle of this size. Operators can therefore use the Leopard for a wide range of work tasks including drill support, pipeline survey, salvage and deep water IRM.
Remotely operated underwater vehicles (ROVs). A remotely operated underwater vehicle, commonly referred to as an ROV, is a tethered underwater vehicle. They are common in deep water industries such as offshore hydrocarbon extraction. While the traditional abbreviation "ROV" stands for remotely operated vehicle, one must distinguish it from remote control vehicles operating on land or in the air. ROVs are unoccupied, highly maneuverable and operated by a crew aboard a vessel. They are linked to the ship by either a neutrally buoyant tether or often when working in rough conditions or in deeper water a load carrying umbilical cable is used along with a tether management system (TMS). The TMS is either a garage like device which contains the ROV during lowering through the splash zone, or on larger work class ROV's a separate assembly which sits on top of the ROV. The purpose of the TMS is to lengthen and shorten the tether so the effect of cable drag where there are underwater currents is minimized. The umbilical cable is an armored cable that contains a group of electrical conductors and fiber optics that carry electrical power, video and data signals back and forth between the operator and the TMS. Where used, the TMS then relays the signals and power for the ROV down the tether cable. Once at the ROV, the electrical power is split and distributed between different components of the ROV. However, in high power applications, most of the electrical power is used to drive a high powered electrical motor which drives a hydraulic pump. The hydraulic pump is then used for propulsion and to power equipment such as torque tools and manipulator arms where electrical motors would be too difficult to implement sub sea. Most ROV's are equipped with at least a video camera and lights. Additional equipment is commonly added to expand the vehicle’s capabilities. These may include sonars, magnetometers, a still camera, a manipulator or cutting arm, water samplers, and instruments that measure water clarity, water temperature, water density, sound velocity, light penetration and temperature. History In the 1970s and '80s the Royal Navy used "Cutlet", a remotely operated submersible, to recover practice torpedoes and mines. RCA (Noise) maintained the "Cutlet 02" System based at BUTEC ranges, whilst the "03" system was based at the submarine base on the Clyde and was operated and maintained by RN personnel. The US Navy funded most of the early ROV technology development in the 1960s into what was then named a "Cable-Controlled Underwater Recovery Vehicle" (CURV). This created the capability to perform deep-sea rescue operation and recover objects from the ocean floor, such as a nuclear bomb lost in the Mediterranean Sea after the 1966 Palomares B-52 crash. Building on this technology base; the offshore oil & gas industry created the work class ROVs to assist in the development of offshore oil fields. More than a decade after they were first introduced, ROVs became essential in the 1980s when much of the new offshore development exceeded the reach of human divers. During the mid-1980s the marine ROV industry suffered from serious stagnation in technological development caused in part by a drop in the price of oil and a global economic recession. Since then, technological development in the ROV industry has accelerated and today ROVs perform numerous tasks in many fields. Their tasks range from simple inspection of subsea structures, pipeline and platforms to connecting pipelines and placing underwater manifolds. They are used extensively both in the initial construction of a sub-sea development and the subsequent repair and maintenance. Submersible ROVs have been used to locate many historic shipwrecks, including that of the RMS Titanic, the Bismarck, USS Yorktown, and SS Central America. In some cases, such as the SS Central America, ROVs have been used to recover material from the sea floor and bring it to the surface. While the oil & gas industry uses the majority of ROVs; other applications include science, military and salvage. Science usage is discussed below, the military uses ROV for tasks such as mine clearing and inspection. Construction Work Class ROV's are built with a large flotation pack on top of an aluminium chassis to provide the necessary buoyancy to perform a variety of tasks. Syntactic foam is often used for the flotation material. A tooling skid may be fitted at the bottom of the system to accommodate a variety of sensors or tooling packages. By placing the light components on the top and the heavy components on the bottom, the overall system has a large separation between the center of buoyancy and the center of gravity: this provides stability and the stiffness to do work underwater. Electrical components can be in oil-filled water tight compartments or one atmosphere compartments to protect them from corrosion in seawater and being damaged by the extreme forces exerted on the ROV while working deep. Thrusters are usually in a vectored configuration to provide the most precise control as possible. The ROV will be fitted with cameras, lights and manipulators to perform basic work. Additional sensors and tools can be fitted as needed for specific tasks. The majority of the work class ROV's are built as described above; however, this is not the only style in ROV building method . Specifically, the smaller ROV's can have very different designs, each geared towards its own task. Military ROV In October 2008 the U.S. Navy began to replace its manned rescue systems, based on the Mystic DSRV and support craft, with a modular system, the SRDRS based on a tethered, unmanned ROV called a pressurized rescue module (PRM). This followed years of tests and exercises with submarines from the fleets of several nations.The US Navy also uses an ROV called AN/SLQ-48 Mine Neutralisation Vehicle (MNV) for mine warfare. It can go 1000 yards away from the ship, and can reach 2000 feet deep. The mission packages available for the MNV are known as MP1, MP2, and MP3.
The charges are detonated by acoustic signal from the ship. The AN/BLQ-11 autonomous Unmanned Undersea Vehicle (UUV) is designed for covert mine countermeasure capability and can be launched from certain submarines.The ROVs are only on Avenger class mine countermeasures ships. There are currently 13 ships, operating mostly off the coast of Japan and California, and there are always four US minesweepers in the Persian Gulf: USS Ardent (MCM-12), USS Dextrous (MCM-13), USS Scout (MCM-8) and USS Gladiator (MCM-11).During August 19, 2011, a Boeing-made robotic submarine dubbed Echo Ranger was being tested for possible use by the U.S. military to stalk enemy waters, patrol local harbors for national security threats and scour ocean floors to detect environmental hazards. As their capabilities grow smaller ROVs are also increasingly being adopted by navies, coast guards, and port authorities around the globe, including the U.S. Coast Guard and U.S. Navy, Royal Netherlands Navy, the Norwegian Navy, the Royal Navy and the Saudi Border Guard. They have also been widely adopted by police departments and search and recovery teams. Useful for a variety of underwater inspection tasks such as explosive ordnance disposal (EOD), meteorology, port security, mine countermeasures (MCM), and maritime ISR (Intelligence, Surveillance, Reconnaissance). Science ROVs ROVs are also used extensively by the science community to study the ocean. A number of deep sea animals and plants have been discovered or studied in their natural environment through the use of ROVs: examples include the jellyfish Bumpy and the eel-like halosaurs. In the USA, cutting edge work is done at several public and private oceanographic institutions, including the Monterey Bay Aquarium Research Institute (MBARI), the Woods Hole Oceanographic Institution (WHOI) (with Nereus), and the University of Rhode Island / Institute for Exploration (URI/IFE).[2][3] The picture to the right shows the behavior and microdistribution of krill under the ice of Antarctica.Science ROVs take many shapes and sizes. Since good video footage is a core component of most deep-sea scientific research, research ROVs tend to be outfitted with high-output lighting systems and broadcast quality cameras.[4] Depending on the research being conducted, a science ROV will be equipped with various sampling devices and sensors. Many of these devices are one-of-a-kind, state-of-the-art experimental components that have been configured to work in the extreme environment of the deep ocean. Science ROVs also incorporate a good deal of technology that has been developed for the commercial ROV sector, such as hydraulic manipulators and highly accurate subsea navigation systems.While there are many interesting and unique science ROVs, there are a few larger high-end systems that are worth taking a look at. MBARI's Tiburon vehicle cost over $6 million US dollars to develop and is used primarily for midwater and hydrothermal research on the West Coast of the US.[5] WHOI's Jason system has made many significant contributions to deep-sea oceanographic research and continues to work all over the globe. URI/IFE's Hercules ROV is one of the first science ROVs to fully incorporate a hydraulic propulsion system and is uniquely outfitted to survey and excavate ancient and modern shipwrecks. The Canadian Scientific Submersible Facility ROPOS system is continually used by several leading ocean sciences institutions and universities for challenging tasks such as deep-sea vents recovery and exploration to the maintenance and deployment of ocean observatories.
Scientific Sea Drones Are Becoming the Eyes of the Navy.From hunting and hiding submarines to planning SEAL missions, a fleet of 65 aquatic, submersible drones is already giving the U.S. Navy a tactical advantage.
Last fall Rutgers University ocean researcher Oscar Schofield headed a collaborative experiment called Gliderpalooza, which coordinated 15 aquatic, submersible research drones to sample the deep waters off the coastal Atlantic. About 5 feet long and shaped like tomahawk missiles, the gliders beam home their data every time they surface. The propellerless drones, jam-packed with scientific instruments, swim by changing their buoyancy—taking on and expelling a soda can's worth of water to sink and float. And they navigate under the waves by themselves. "The gliders are autonomous, so you just throw them in the water and off they go," Schofield says, though they can also take directions from operators when they surface. With this robotic flotilla—part of the new wave of ocean-going drones—Schofield and his colleagues could gather a detailed picture of the ocean's temperature, currents, wildlife, and water quality at depths up to 650 feet. But even as ocean researchers use these gliders to track fish and help predict storms, the drones have attracted another admirer—the U.S. Navy. "Right now the Navy is at the forefront of this technology," Schofield says, "and the Office of Naval Research really funded and developed these gliders in the first place." The Navy currently owns 65 of the same kind of gliders Schofield operates, with plans to expand to 150 by 2015. But the Navy's interest isn't exactly in science. The fleet of gliders is helping the Navy gain a tactical advantage in the ocean's future war zones. Operational Planning. "As the Navy plans for operations, they have to look into the future," says Frank Bub, the lead ocean modeler at the Naval Oceanographic Office. In other words: As the Navy maps out anything from a SEAL team silently breaching onto shore to a subsurface naval exercise, it must predict how the movement of the seas will affect its plans. "The Navy relies on ocean models not just to forecast future conditions but to fill in the gaps where data may never have been collected," Bub says. This is where the gliders come in. By sending a scientific drone through or near an area of interest, the "gliders provide us real-time ocean data, and that has two major applications," Bub says. The Navy can use that data not only to check the accuracy of its models, but to adjust or correct them. "If the Navy SEALs have a mission and they're going ashore, they definitely want to know what the ocean conditions are from when they leave their mother ship to when they land on the beach," Bub says. Gliders could provide temperature data so the SEALs wear the right gear, or gliders could give the most accurate description of currents so the SEALs swim in the right direction as quickly and quietly as possible. Where the gliders can have the biggest impact are the places where the Navy can't or isn't allowed to go. While he's not at liberty to list them all, Bub points to places where the Navy currently has significant interest: "The Navy is in the western Pacific, the northern Indian Ocean, and the Navy spends time in the Mediterranean," he says. It's in these places (perhaps even around the increasingly tense East China Sea) that gliders could slip in silently to gather intelligence. "The gliders are clandestine," Bub says. "They spend very little time on the surface, they're not generally detectable, and although they communicate through the Iridium satellite system, they've been encrypted." And Schofield says this type of clandestine mission could be done from far away. Even though the gliders swim at less than a mile per hour, their propellerless propulsion and battery packs allow them to stay at sea for up to a year. "And you can launch a glider pretty far away from a region of interest. I could deploy one a hundred miles away from where I have it fly in," Schofield says. Hunting and Hiding Submarines. Much of the time submarines operate in the dark—they're often deployed to places with limited oceanographic data. Schofield uses temperature as an example. "Satellites observe sea surface temperature by using infrared light," he says, "but infrared light penetrates only centimeters into the water, so you can't really extract any information from very deep in the ocean." Without satellites, ocean modelers rely only on a few thousand global research buoys as well as ships and research stations, which combine to provide an uneven and low-resolution picture. Bub says it's crucial for a sub commander to understand both the temperature and salinity of deep waters. That's because the key to avoiding detection is to understand not only how much sound you're producing but where and how far it's traveling, and temperature and salinity play important roles in how sound propagates underwater. "Sound in warm water goes faster than sound in cold water, and just like light, it will refract and bend," with changes in the salinity, depth, and temperature of the water, Bub says. "So for submarine warfare, the key is to take these qualities and convert them into sound speed. Then we can run acoustic models and find out how the sound propagates through the ocean." Here, too, undersea gliders—which take snapshots of the deep ocean several times per second—are ideally suited for the job. Although the current Navy drones can reach a depth of only 3000 feet, the Navy already has plans for a newer version that could dive to more than 1 mile below sea level. By mapping the deep seas, the Navy thinks it can find places that are best for hiding subs. "And on the other hand, our destroyers and other antisubmarine warfare ships want to know where other submarines are," Bub says. By taking advantage of our glider-aided acoustic models, "we can actively put sound in the water," with things such as active sonar and sonobuoys, "which travels on paths that are determined by our ocean models," he says.
An all-electric, fuel cell-powered, unmanned aerial system (UAS) aircraft has been successfully launched from the submerged 'USS Providence' (SSN 719) & flew a several hour mission demonstrating live video capabilities streamed back to the submarine, surface support vessels and Norfolk base before landing at the Naval Sea Systems Command Atlantic Undersea Test and Evaluation Center (AUTEC), Andros, Bahamas. From concept to fleet demonstration, the Navy says this idea took less than six years to produce in a collaboration between the U.S. Naval Research Laboratory (NRL) with funding from SwampWorks at the Office of Naval Research (ONR) and the Department of Defense Rapid Reaction Technology Office (DoD/RRTO).The successful submerged launch of a remotely deployed UAS offers a pathway to providing mission critical intelligence, surveillance and reconnaissance (ISR) capabilities to the U.S. Navy's submarine force. The NRL developed aircraft XFC UAS - experimental Fuel Cell Unmanned Aerial System - was fired from the submarine's torpedo tube using a 'Sea Robin' launch vehicle system. The Sea Robin launch system was designed to fit within an empty Tomahawk launch canister (TLC) used for launching Tomahawk cruise missiles already familiar to submarine sailors. Once deployed from the TLC, the Sea Robin launch vehicle with integrated XFC rose to the ocean surface where it appeared as a spar buoy. Upon command of Providence Commanding Officer, the XFC then vertically launched from Sea Robin. The XFC aircraft is a fully autonomous, all electric fuel cell powered folding wing UAS with an endurance of greater than six hours. The non-hybridized power plant supports the propulsion system and payload for a flight endurance that enables relatively low cost, low altitude, ISR missions. The XFC UAS uses an electrically assisted take off system which lifts the plane vertically out of its container and therefore, enables a very small footprint launch such as from a pickup truck or small surface vessel.
CUTTING THE COST OF HUNTING SHIPWRECKS.
Nearly 100 years after the three-masted schooner, the Hattie Wells, sank in Lake Michigan during heavy weather, it has been filmed by the most advanced ROV of its kind in the world. A key element of the mission undertaken by a team of marine archaeologists has been to prove the value of using an ROV to document shipwrecks in America's Great Lakes, says Dr Mark Gleason, chief marine scientist and director of education at Great Lakes Naval Memorial and Museum (GLNMM). By turning to specialist ROV operator, Seaview Systems, they were able to cut the cost usually associated with launching an ROV from a large support vessel by using the compact but highly sophisticated deep-rated Saab Seaeye Falcon DR ROV. Matthew Cook of Seaview Systems explains that marine archaeology requires the collection of high quality video, still images and environmental and position data of a shipwreck in order to capture the full historical significance of the site. He sees an ROV as representing a very efficient means of collecting this information in a wide range of water depths. 'One of the larger expenses in a research project,' says Matthew Cook, 'is the support vessel from which ROV operations are conducted. Since 2006 we have been leveraging the benefits of the compact fiber optic Falcon DR which can dive to 1000m from relatively inexpensive vessels of opportunity, in order to explore a range of historic shipwrecks, corals and other benthic habitats.
Falcon launched into Lake Michigan.
'The fiber optic Seaeye Falcon DR represents an ideal balance of capability and ease of mobilization in a small, powerful and stable package. By deploying from a relatively inexpensive vessel of opportunity, project budget is conserved allowing for a longer, more detailed campaign. Running a wide bandwidth fiber optic system means the vehicle is able to support a host of sensors and cameras normally only found on larger vehicles.' The Hattie Wells project that has included archival research, sidescan survey and ROV dive operations, has brought together representatives from government, private business and educational non-profits. Built in 1867 the Hattie Wells was originally a 135 ft three-masted schooner, later lengthened by 30 ft and the rigging removed. Over the years she courted disaster on a number of occasions including collision, grounding and a lightning strike. After grounding in 1892 she was given up for lost but was later salvaged as a wreck and towed back to Detroit for refit. Once again afloat, she continued in service, later as a barge. In November 1912, whilst hauling timber, she hit heavy weather and took in water. Shifting cargo smashed the pilot house containing the donkey engine that powered the bilge pumps. With the only means of removing water gone, the vessel was doomed to sink and so the towing tug cut the hawser and rescued all five hands on board. The Falcon DR has a world-wide following with over 220 in use offshore, inshore and down tunnels. Users are attracted by the Falcon's reputation for power, reliability and unequalled stability in strong cross-currents - particularly in a vehicle small enough to be manhandled into the water. Rapid role-change during operations is a key feature where intelligent electronics offer a 'plug and go' simplicity that allows up to 128 devices to be added and changed easily, such as extra cameras, lights, tracking system, manipulator and sonar, plus the option of adding special tooling on a removable skid. Its unrivalled finger-tip manoeuvrability comes from five brushless DC thrusters with velocity feedback for precise and rapid control in all directions and an ability to hold steady in strong cross currents. The deep rated Falcon has built-in fibre optics for high volume data transmission over its long umbilical, and the ability to use broadcast quality video cameras. It also has tilting variable intensity lights linked to its camera tilt mechanism for superior illumination when filming above or below the vehicle. Dr Gleason of GLNMM concludes, 'I think it is safe to say each organisation had different objectives. Ours was to demonstrate, through a real project, the usefulness of this type of ROV in documenting shipwrecks in the Great Lakes. Plus we wanted to work in partnership with Seaview, NOAA and MSRA/NUMA to explore a new shipwreck and hopefully be able to partner on larger projects in the future.
THE SAAB SEAEYE COUGAR HUNTS IN CASPIAN JUNGLE.
With the Caspian seabed a hazardous jungle of un-recorded old pipes and cables from the Soviet era, a Cougar XT ROV from Saab Seaeye is to become a vital investigative tool now that new pipelines are being laid. After a favourable experience operating the vehicle elsewhere, highly skilled engineers of the State Oil Company of Azerbaijan, SOCAR, decided to deploy the Cougar XT in the Caspian Sea for their underwater applications. The ROV will be used for diving and pipeline inspection of the SOCAR current projects, and for future seabed inspection as new pipes are laid. In addition to pipeline inspection and seabed survey, it will be used for a variety of tasks including the inspection and survey of vessels and platform legs. SOCAR has taken a high-spec version of the 2000m rated Cougar XT with an upgraded video package including two Kongsberg high-definition mono low-light cameras, two Kongsberg colour zoom cameras, pan and tilt platform and LED lighting. The ROV will be launched from a Saab Seaeye stainless steel tether management system fitted with a camera and upgraded MUXs. Deploying the Cougar will be a crane style launch and recovery system, supplied with a bullet/swivel assembly and lock latch assembly, together with an A60 zone ll rated ROV control cabin.
POWER TO THE SEAEYE ROV OPERATOR.
A more powerful ROV than any other of its class on the market has been launched by top manufacturer, Saab Seaeye. The Panther XT Plus, rated for operation to a depth of 1500m, is the latest addition to the successful Panther range - and with two systems already sold for delivery in the first quarter of 2011 this latest version is generating considerable interest in the ROV market. The new advanced ROV gives operators about double the horizontal thruster power compared with the Panther XT, which makes it the most powerful ROV in its class with over 50% more thrust than its nearest competitor. Its power to weight ratio is also over twice its nearest competitor providing exceptional response and precise control. Packed with ten powerful thrusters, not only can it swim over 30% faster than anything else of its type, but it can hold steady in strong cross currents, making it an ideal vehicle for survey work. Having ten thrusters in hand also brings peace of mind to operators working to a tight deadline or in difficult conditions by offering a reassuringly high degree of redundancy. In addition to unrivalled thrust performance, the front end of the Panther XT Plus has been re-designed to accommodate industry standard seven function position feedback manipulators providing the operator with heavy-duty power and precise control allowing faster completion of complex manipulator tasks. To accommodate the larger and heavier manipulator arms and provide additional capacity to fit further tools and sensors the vehicle payload has been significantly increased over the standard Panther XT. For the ROV operator, another significant advantage of increased power found in the new light-work ROV, is an ability to carry a greater range of tooling options for a wider range of tasks, including work, observation and survey, all in a small footprint. This need for less deck space, around a quarter of an equivalent hydraulic vehicle, together with fewer crew and lower vehicle cost, gives an overall lower cost of ownership that lies behind the success of the long established Panther range, a design concept that can match an hydraulic equivalent in most work tasks including drill support, IRM, survey and some construction tasks.
Robotic Submarines Removing Oil Leak.
Robotic submarines removed the cap that had been placed on top of the leak in early June to collect the oil and send it to surface ships for collection or burning. BP aims to put a new, tighter cap in place and said that, as of Saturday night, the work was going according to plan. If tests show it can withstand the pressure of the oil and is working, the Gulf region could get its most significant piece of good news since the April 20 explosion on the BP-leased Deepwater Horizon rig, which killed 11 workers. BP began trying Saturday afternoon to remove the bolted top flange that only partially completed the seal with the old cap. Video images showed robotic arms working to unscrew its bolts. Wells said that could last into Monday depending on whether the flange can be pulled off from above, as BP hopes. If not, a specially designed tool will be used to pry apart the top and bottom flanges. Once the top flange is removed, BP has to bind together two sections of drill pipe that are in the gushing well head. Then a 12-foot-long piece of equipment called a flange transition spool will be lowered and bolted over it. The second piece of pipe inside the well head came as something of a surprise, and raises the possibility that one of the sections of pipe became jammed in the Deepwater Horizon's blowout preventer, though which the well pipes run. The failure of the blowout preventer, a massive piece of equipment designed to stop the unchecked flow of oil, is partly to blame for the size of the spill. Ultimately, BP wants to have four vessels collecting oil within two or three weeks of the new cap's installation. If the new cap doesn't work, BP is ready to place a backup similar the old one on top of the leak. The government estimates 1.5 million to 2.5 million gallons of oil a day are spewing from the well, and the previous cap collected about 1 million gallons of that. With the new cap and the new containment vessel, the system will be capable of capturing 2.5 million to 3.4 million gallons - essentially all the leaking oil, officials said. The plan, which was accelerated to take advantage of a window of good weather lasting seven to 10 days, didn't inspire confidence in the residents of the oil-slicked coast. Robotic submarines working a mile underwater removed a leaking cap from the gushing Gulf oil well Saturday, starting a painful trade-off: Millions more gallons of crude will flow freely into the sea for several days until a new seal can be mounted to capture all of it. There's no guarantee for such a delicate operation almost a mile below the water's surface, officials said, and the permanent fix of plugging the well from the bottom remains slated for mid-August. How It Would Work. The latest effort to cap and contain the Gulf oil spill is a multistep process.
Here's how it would work: 1. The existing containment cap will be removed - perhaps in a matter of minutes. 2. Robot submarines will then remove a stub of pipe that's bolted to the top of the blowout preventer. That could be tricky, involving the removal of six large bolts. Once the stub is removed, that will expose a flat plate, or flange. 3. Two pipes that are sticking up inside the blowout preventer will be then strapped together. 4. BP will then install a cylindrical device over the protruding pipes that will be bolted down onto the flange. 5. BP will then install a manifold, or valve system, on top of that cylindrical device. 6. Once that valve system is in place, BP will need to connect four pipes or houses to oil processing ships at the surface. That should be enough to capture 60,000 to 80,000 barrels of oil per day, which should be enough to capture all the oil from the runaway well. Federal officials estimate that the well is spewing between 35,000 and 60,000 barrels of oil per day.
Robotic Submarines Navigate Underwater Course Autonomously.
Teams from nine universities gathered at NATO's Undersea Research Center to pit their robotic submarines against each other. Hanwha, a Korean conglomerate involved in the chemicals, explosives and defense sectors, is set to advance into the commercial market for unmanned submarines after securing the government’s commitment for technology transfer. According to the Ministry of Land, Transport and Maritime Affairs, Hanwha has agreed to purchase core technologies involving the designing and manufacturing of unmanned submarines that have been developed by the state-run Korea Ocean Research and Development Institute (KORDI) since 2007. The global market for unmanned submarines is currently divided between companies from the United States, Canada, Britain, Norway and Russia, and the front-runners have been serious about preventing potential rivals from accessing their technologies. Korea, eager to get a slice of the market, was willing to start from scratch. About 3.5 billion won ($2.9 million) in taxpayers’ money was spent on KORDI’s research, ministry officials said, and Hanwha will be paying 7.5 billion won for the results. Robotic, remote-controlled submarines, which are capable of gliding through the ocean and penetrating inaccessible spots, are garnering increasing attention from governments and companies for their distinctive edge in exploration. The current model designed by KORDI is capable of patrolling shallow waters less than 500 meters deep, but the government is financing a separate project to develop unmanned submarines that could reach depths of 6,000 meters. Hanwha is expecting healthy demand for its future unmanned submarines, including potential interest from the military. The unmanned submarines could be used for monitoring territorial waters, exploring for resources or supporting oceanographic studies. They could also be used to investigate pollution in rivers, said a Hanwha spokesman. These machines could also provide a more effective way to patrol sea boarders and detect and destroy mines.
UNIVERSITY OF MICHIGAN ORDERS IVER2- AUV.
WORLD’S SMALLEST AND SMARTEST SURVEY SYSTEM CUTS COSTS.
Robotic submarines of the future.World’s oceans has no shortage of resources, on the contrary, there are untapped resources or resources for which is seeking means of exploitation. Most of untapped resources are found at deep in the sea, a depth of over 4,000 meters (2.5 miles). Such a high deep involves important technological resources for exploitation and also high increasing costs. The appetite for world’s resources are increasing, one common barrier found in exploitation of deep sea is the currently used technologies. A submarine controlled from a ship is always in contact with the user through cables. Is not yet invented an alternative technologies to substitute the cables used to control the submarines. Radio waves cannot propagate in the water, are the same as a train arrived at the end of the line from where it can go on. The optimal solution is not the use of thousands of meters of cable to control the submarine. In addition it is almost impossible to make an operation to thousands of meters deep with such a long cable. Exploitation the resources of the oceans in future belongs to robots. Used for many years for the most difficult and dangerous tasks, the robots represent the ideal solution for exploitation of resources found in oceans or sea. Since 1957 from the AUV concept of the University of Washington were made the first steps in developing autonomous underwater vehicles(AUV). Autonomous vehicles must comply with certain principles without which there can be chances of exploitation. These must be equipped with artificial intelligence to avoid obstacles, change course, and make other decisions in response to its environment.
Odyssey IV
Odyssey IV is the latest robot submarine built in the halls of science of MIT. Fortunately is not just a project on a piece of paper, is a completed and functional project. If in introduction I wrote about depth of up to 4000 meters, Odyssey IV perhaps more than. In a demonstration made by builders, the robot reached the impressive depth of 6000 meters in depth of the ocean. Diving speed is 1,4 m/s.
UJI
Also in a university was born UJI, a robot submarine who can rescue black boxes or used for oil companies. UJI ,or made in UJI, is an autonomous robot which requires no human hand, is small and lightweight – weighs only 200 kilograms. If the robot from MIT resist in water at least one day, UJI robot has low performance. We can say that is an exemplary diver who can work only 8 hours in water. In all these hours of work the device can be loaded with up to 12 kg of material. The robot can be used in oil exploration in deep-sea rescue, treasure hunts and all sorts of objects in underwater archeology, clean ports, or take samples.
Unmanned Subs Making Waves In Undersea WarfareUnmanned aircraft have been playing a major role in the wars in Iraq and Afghanistan for years. Now, the U.S. military is beginning to field unmanned submarines.
WHOI Selects Hydroid to Provide AUVs for Ocean Observatories InitiativeThe Woods Hole Oceanographic Institution (WHOI) awarded .Hydroid (Pocasset, Massachusetts) an approxmiately $1 million contract to provide AUVs and docking stations to support the Pioneer Array of the Ocean Observatories Initiative (OOI), WHOI announced last week.
Subsea Robotics: ROV & AUV Market Trends. The Duke University Center on Globalization, Governance and Competitiveness (CGGC) recently completed a study on ocean technologies, including remotely operated vehicles (ROVs) and autonomous underwater vehicles (AUVs), for a consortium led by Nova Scotia’s Department of Economic and Rural Development and Tourism (ERDT). Excerpts from the report on the market and technology trends in ROVs and AUVs are provided in this article.
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||



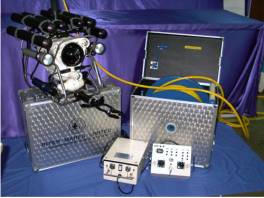













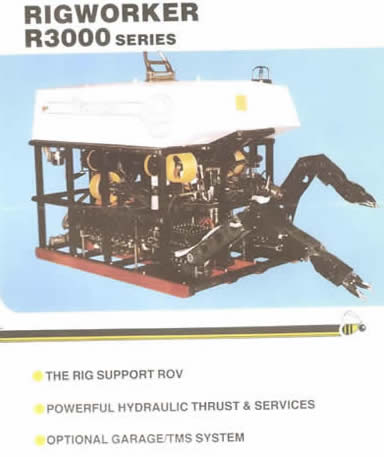
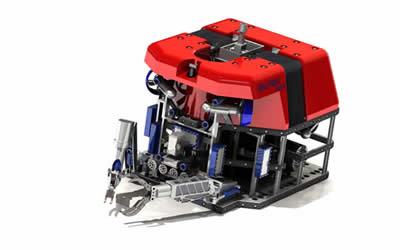

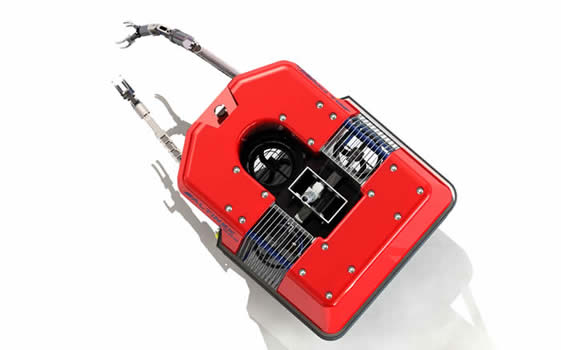

 The
Ultimate Phantom Rov has been upgraded to a depth of 800m (2500ft).
Four horizontal thrusters, three vertical thrusters and two lateral
thrusters allow for powerful maneuverability in all axes.
The
Ultimate Phantom Rov has been upgraded to a depth of 800m (2500ft).
Four horizontal thrusters, three vertical thrusters and two lateral
thrusters allow for powerful maneuverability in all axes. 















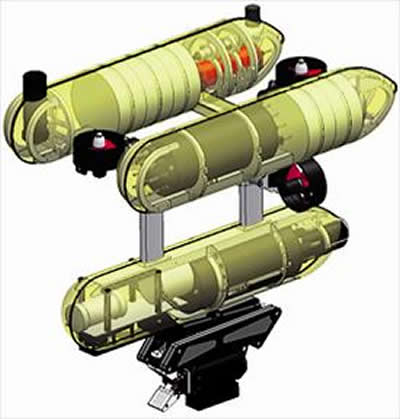




{kind=link}